- асинхронні,
- колекторні;
- синхронні.
Кожен із перелічених двигунів є частиною електроприводу, який призначений для його зв'язку з корисним навантаженням. Залежно від того, яке це навантаження, електродвигун вимикається і знову запускається. Далі детальніше розповімо про те, що відбувається при пуску електродвигуна і як оптимізувати цей процес.
Що відбувається при пуску асинхронного двигуна
Для розуміння того, який пристрій можна застосувати для плавного пуску електродвигуна, треба знати принцип його роботи. Найпоширеніші двигуни – асинхронні із короткозамкненим ротором. Їхня проста конструкція та відповідна надійність і зумовили популярність цих електричних машин. Хоча ротор обертається, і його форма оптимізована під цей процес, він не що інше, як вторинна обмотка трансформатора.
А, як відомо, якщо в первинній обмотці тече струм, то в її осерді з'являється електромагнітне поле. Перелічені функції в асинхронному двигуні виконує статор. Його магнітне поле, яке, на відміну трансформатора, обертається навколо ротора, індукує у ньому струми, пов'язані з цим обертанням. І чим більша різниця швидкостей поля та ротора, тим більше струм в останньому. Адже ротор – це обмотка, замкнута коротко. А якщо існує трансформаторний зв'язок, значить, струми в обмотках залежні прямо пропорційно.
Тепер перерахуємо умови, які існують при пуску асинхронного двигуна, що живиться від промислової мережі. Спочатку розглянемо трифазний варіант:
- постійна напруга;
- постійна частота;
- ротор у стані спокою.
Приєднання асинхронного двигуна до електромережі миттєво створює магнітне поле, що обертається. При цьому різниця швидкостей його та ротора (так зване ковзання, що виражається у відсотках від швидкості обертання електромагнітного полястатора) виходить максимальною. І, як наслідок цього – як би режим короткого замикання трансформатора. Якщо потужність двигуна велика, пускові струми виходять лише на рівні тих, що з трансформаторів аналогічної електричної потужності вважаються аварійними.
Який пристрій застосувати для їх обмеження цілком зрозуміло. Воно має:
- або зменшити величину напруги на обмотках статора на час розгону ротора;
- або розкрутити ротор до приєднання статора до електромережі.
- Також можна внести конструктивні зміни до асинхронного двигуна.
Перемикання схеми обмоток
Привести в рух ротор можна лише у певних електроприводах. Тому такий спосіб не є типовим. Залишаються два, перший з яких найбільше широко використовується. Але отримати падіння напруги без втрат не так просто. У трифазному ланцюзі це можна зробити перемиканням із трикутника на зірку і назад. Лінійна напруга, прикладена до обмоток статора двигуна, забезпечує в робочому режимі його більш високу ефективність. Але й пусковий струм у схемі трикутника виходить більше.
Тому перемикання на схему зірка дозволяє помітно знизити пусковий струм асинхронного двигуна. Це найпростіший спосіб щодо плавного запуску. У ньому застосовано мінімальне число додаткових елементівоскільки падіння напруги створюється можливостями самої трифазної електромережі. Цими елементами є комутатори, а сама схема показана далі. Але така проста схемазастосовна лише трифазної мережі. В однофазному варіанті немає діючої напруги нижчої, ніж фазне.

Використання резисторів
Щоб отримати максимально плавний розгін двигуна, необхідно використовувати елементи, які забезпечують відповідне падіння напруги. З цією метою застосовуються:
- резистори;
- дроселі (реактори);
- автотрансформатори;
- магнітні підсилювачі.
Ці способи підходять як для трифазної, так однофазної мережі. У будь-якому випадку доведеться задіяти комутатори, оскільки в певний момент потрібно приєднати двигун до мережі безпосередньо. Схема з резисторами виходить найбільш компактною. Однак у міру збільшення потужності двигуна відповідно збільшується потужність пускових резисторів. Враховуючи обставину їх нагрівання, час пуску має бути в межах їхнього допустимого температурного діапазону. Інакше від перегріву резистори прийдуть у непридатність. Схема плавного пуску на резисторах показано далі.

Використання індуктивностей
Якщо клонувати схему, можна отримати плавний пуск, використовуючи кілька груп резисторів, з'єднаних паралельно, що полегшить їхнє температурне навантаження. Але збільшення часу плавного пуску супроводжуватиметься збільшенням втрат енергії у цих резисторах. Тому замість резисторів застосовуються індуктивні елементи. У найпростішому випадку це дроселі. Це більш громіздке і дороге рішення, але для зниження втрат енергії через частих повторних пусків двигунів доводиться його використовувати. Зовнішній вигляд реактора для потужного асинхронного двигуна представлений нижче.

Якщо індуктивність, що використовується при запуску, виконати у вигляді автотрансформатора з рухомим контактом, що переміщається по витках обмотки, можна або оптимально налагоджувати процес пуску, або керувати ним, переміщуючи рухомий контакт. Недоліком цього варіанта буде неминуче іскріння у механічному контакті. Тому він застосовний лише при порівняно малих потужностях двигунів. Схеми пристроїв плавного пуску з реакторами та автотрансформаторами показані далі.

Схеми плавного пуску:
а) із реакторами;
б) із автотрансформаторами.
1, 2 та 3 – комутатори, що керують перемиканням
Для плавного пуску без недоліків, властивих автотрансформаторам з рухомим контактом, використовуються магнітні підсилювачі. Вони застосовано подмагничивание, що дозволяє змінювати величину індуктивного опору. Конструкція магнітних підсилювачів досить різноманітна. Але їхня головна перевага – це малий струм і, відповідно, потужність, яка використовується для управління. Вони немає регулювальних контактів, якими течуть великі струми. Одна із схем показана далі.

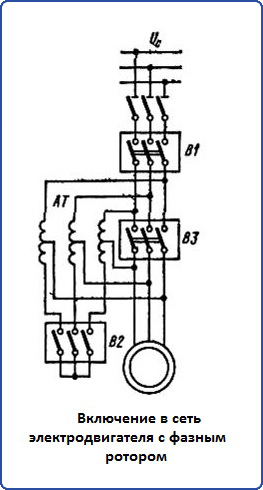
Двигун із фазним ротором
Усі розглянуті пристрої плавного пуску асинхронного електродвигуна задіяні за його статора. Але коли постійні повторні включення для движка нормальним робочим процесом, його конструкцію змінюють, роблячи ротор фазним. Таке конструктивне рішення дає можливість ефективніше регулювати струми, що виникають при розгоні двигуна. Конструкція та рекомендації щодо експлуатації пристрою плавного пуску двигуна з фазним ротором показані нижче:

Застосування напівпровідникових ключів
Усі перелічені пристрої плавного пуску використовуються вже багато років. У них є важлива властивість, яка ставить їх ніби поза конкуренцією. Ці пристрої не мають електричних параметрів, перевищення яких призводить до зникнення опору (пробою). Отже, вони найнадійніші, хоч і морально застаріли. Сучасні пристроїплавного пуску використовують керовані напівпровідникові ключі (тиристори та транзистори). Це так зване широтно-імпульсне регулювання.
Ключ відсікає частину синусоїдальної напруги за часом. В результаті середнє значення напруги можна змінити від нуля і до 220 В, що діє. Отже, напівпровідниковий ключ забезпечує найбільш ефективний варіант для створення пристрою плавного пуску електродвигуна. Але при цьому ключ схильний як до теплового пробою, так і аналогічного впливу через перевищення амплітуд напруги і струму. Тому ключ повинен ефективно охолоджуватися і вибиратися відповідно до умов експлуатації двигуна.

Пристрої з широтно-імпульсним регулюванням застосовні в будь-якій мережі незалежно від числа фаз. Одна з таких схем показана нижче. Контакти після розгону ротора замикаються та оберігають ключі від пошкодження стрибками струму та напруги.


Плавний запуск колекторних електродвигунів
Незважаючи на важливі відмінності конструкції в порівнянні з асинхронними, запуск колекторних двигунів також супроводжується великим струмом якоря, який є ротором. По суті, це складання з дроселів із послідовною комутацією кожного з них. Чим довше експозиція напруги на ламелях колектора, що і виходить відразу після включення та подачі напруги, тим сильніше намагнічування сердечника і більше величина, якої струм встигає досягти.
При виконанні статора у вигляді постійного магніту джерело живлення необхідне лише якорю. Але в такому разі його напруга може бути лише постійною. Пристрій плавного пуску, що живиться цим джерелом, робиться тільки на елементах, здатних створити падіння постійної напруги.
Цими елементами є:
- резистори,
- транзистори,
- тиристори, що замикаються.
Якщо статор виконаний як електромагніт, значить, можлива робота двигуна на змінній напрузі. При згаданому колекторних двигунах підходять ті ж перевірені часом пристрої плавного пуску, які застосовні для однофазних асинхронних двигунів:
- резистори (реостати);
- дроселі (реактори);
- автотрансформатори;
- магнітні підсилювачі.
А також сучасні технічні рішення, що базуються на напівпровідникових ключах. Їхні зображення аналогічні вже показаним вище.
За наявності електромагнітного збудження обмотка може з'єднуватися з якорем або послідовно, або паралельно. Послідовне з'єднання безпечне, оскільки в електричному ланцюзі тече електричний струм. Її розрив або приєднання до джерела живлення викликає одночасну зміну струму в обмотках двигуна. Але при паралельному поєднанні можливі варіанти розвитку подій.
Якщо при подачі напруги на двигун обмотка збудження виявиться знеструмленою, а якір запитан, з'являться умови для явища, що називається рознесенням двигуна. При цьому ротор, прагнучи притягнутися до заліза статора, повертається і розганяється все швидше та швидше. Якщо до валу не прикладено навантажувальний момент, за величиною більший, ніж створюваний ротором, розгін може продовжуватися до руйнування ротора. Для захисту від рознесення необхідно, щоб:
- двигун залишався хоча б частково навантаженим;
- мав спеціальні конструктивні елементи;
- пристрій плавного пуску гарантовано запобігало цьому процесу.
Плавний пуск синхронного двигуна
Синхронні двигуни, що працюють від електромережі з будь-яким числом фаз, розганяються як асинхронні, з використанням ковзання. Потім, перетворюючи ротор на магніт, незалежний від статора, відбувається вирівнювання швидкостей обертання поля статора та ротора. З цієї причини пристрої плавного пуску, що застосовуються для синхронних двигунів, ті самі, що і для асинхронних. Деякі відмінні деталі, що залежать від живлення ротора, можна бачити на зображенні:

Висновки
Загалом пристрої плавного пуску всіх типів електричних двигунів аналогічні і засновані на тих самих схемах і елементах. Вибір треба робити для конкретних умов, виходячи насамперед із потужності двигуна. Але сучасні напівпровідникові ключі дозволяють забезпечити у широкому діапазоні потужностей найкращі параметри плавного пуску. Тому має сенс зупинити вибір насамперед на них.
Асинхронний електродвигун має можливість самостійного запуску через взаємодію між потоком магнітного поля, що обертається, і потоком обмотки ротора, викликаючи високий струм в ньому. В результаті статор споживає великий струм, який на момент досягнення двигуном повної швидкості стає більше номінального, що може призвести до нагрівання двигуна та його пошкодження. Для запобігання цьому необхідно влаштувати плавний пуск електродвигуна (УПП).
Принцип роботи пускача
Він полягає в тому, що пристрій регулює напругу, що додається до двигуна під час пуску, контролюючи характеристики струму. Для асинхронних двигунів пусковий момент приблизно пропорційний квадрату пускового струму. Він пропорційний доданій напрузі. Крутний момент також можна вважати приблизно пропорційним доданому напрузі, таким чином регулюючи напругу під час пуску, струм, споживаний машиною, і його крутний момент контролюються пристроєм і можуть бути зменшені.

Використовуючи шість SCR в конфігурації, як показано на малюнку, пристрій плавного пуску може регулювати напругу, що подається на двигун при запуску від 0 вольт до номінальної лінійної напруги. Плавний запускелектродвигуна може здійснюватися трьома способами:
- Прямий запуск із застосуванням повної напруги навантаження.
- Застосовуючи поступово знижене.
- Застосування пуску часткової обмотки за допомогою стартера автотрансформатора.
УПП можуть бути двох типів:
- Відкрите управління: напруга пуску подається із затримкою в часі незалежно від струму або швидкості двигуна. Для кожної фази два SCR проводяться спочатку із затримкою на 180 градусів протягом відповідних напівхвильових циклів (для яких виконується кожен SCR). Ця затримка поступово зменшується з часом до тих пір, поки прикладена напруга не досягне номінального значення. Вона також відома як система тимчасової напруги. Цей метод практично не контролює прискорення двигуна.
- Контроль замкнутого контуру: контролюються будь-які характеристики вихідного сигналу двигуна, такі як струм або швидкість. Пускова напруга змінюється відповідно для отримання необхідного відгуку. Таким чином, завданням УПП є контроль кута провідності SCR та управління напругою живлення.
Переваги плавного пуску
Твердотілі плавні пускачі використовують напівпровідникові прилади для тимчасового зниження параметрів на клемах двигуна. Це забезпечує контроль струму двигуна, щоб зменшити крутний момент граничного значення двигуна. Управління засноване на управлінні напругою клем двигуна на двох або трьох фазах.
Декілька причин, чому цей метод кращий за інші:
- Підвищена ефективність: ефективність системи УПП з використанням твердотільних перемикачів обумовлена переважно низьким станом напруги.
- Керований запуск: пускові параметри можна контролювати, легко змінюючи їх, що забезпечує його запуск без будь-яких ривків.
- Кероване прискорення: прискорення двигуна контролюється плавно.
- Низька вартість та розмір: це забезпечується з використанням твердотільних перемикачів.
Компоненти твердотільних пристроїв
Вимикачі живлення, такі як SCR, які піддаються фазовому контролю кожної частини циклу. Для трифазного двигуна два SCR підключаються до кожної фази. Реле плавного пуску електродвигуна повинні бути розраховані щонайменше втричі більше, ніж лінійна напруга.
Робочий приклад системи трифазного асинхронного двигуна. Система складається з 6 SCR, контрольної логічної схеми у вигляді двох компараторів - LM324 та LM339 для отримання рівня та напруги рампи та оптоізолятора для керування додатком напруги затвора до SCR на кожній фазі.
Таким чином, керуючи тривалістю між імпульсами або їх затримкою, керований кут SCR контролюється та регулюється подача живлення на етапі пуску двигуна. Весь процес насправді є системою управління з розімкненим контуром, в якій контролюється час застосування імпульсів запуску затвора для кожного SCR.
Основи SCR

SCR (Silicon Controlled Rectifier) є керованим стабілізатором потужності постійного струму з високою потужністю. Пристрої плавного пуску асинхронних двигунів SCR являє собою чотиришаровий напівпровідниковий кремнієвий пристрій PNPN. Воно має три зовнішні термінали і використовує альтернативні символи на малюнку 2 (a) і має транзисторну еквівалентну схему на малюнку 2 (b).
Основний спосіб використання SCR як перемикач з анодом, позитивним щодо катода, керованим у момент запуску машини.
Основні характеристики SCR можна зрозуміти за допомогою цих діаграм. Пристрій плавного пуску електродвигуна можна включити і змусити діяти як випрямляч з прямим зміщенням кремнію, короткочасно застосовуючи струм затвора через S2. SCR швидко (протягом декількох мікросекунд) автоматично зафіксується у ввімкнений стан і залишається увімкненим навіть при видаленні затвора.
 Ця дія показана на малюнку 2 (b) струм початкового затвора включається Q1, а струм колектора Q1 включається Q2, струм колектора Q2 потім утримує Q1, навіть коли затвора видаляється. Потенціал насичення становить 1 або близько того і створюється між анодом і катодом.
Ця дія показана на малюнку 2 (b) струм початкового затвора включається Q1, а струм колектора Q1 включається Q2, струм колектора Q2 потім утримує Q1, навіть коли затвора видаляється. Потенціал насичення становить 1 або близько того і створюється між анодом і катодом.
Для увімкнення SCR потрібно лише короткий імпульс затвора. Як тільки SCR буде зафіксовано, він може бути знову відключений, короткочасно зменшуючи його струм анода нижче певного значення, як правило, кілька міліампер, у додатках АС вимкнення відбувається автоматично в точці перетину нуля в кожному напівперіоді.
Значний коефіцієнт посилення доступний між затвором і анодом SCR, а низькі значення затвора струму (зазвичай кілька мА або менше) можуть контролювати високі значення анодного струму (до десятків підсилювачів). Більшість SCR мають анодні номінали у сотні вольт. Характеристики затвора SCR аналогічні характеристик транзисторного з'єднання - емітера транзистора (див. мал. 2 (b)).
Внутрішня ємність (кілька pF) існує між анодом і затвором SCR, і напруга, що різко зростає, з'являється на аноді, може викликати достатній прорив сигналу до затвора для включення SCR. Цей «ефект швидкості» може бути викликаний перехідними процесами на лінії живлення і т. д. Проблеми з ефектом швидкості можна подолати, проводячи мережу згладжування CR між анодом та катодом, щоб обмежити швидкість підйому до безпечного значення.
 Мережева напруга змінного струму (рис. 5) випрямляється за допомогою пасивного діодного моста. Це означає, що діоди спрацьовують, коли лінійна напруга більша за напругу на секції конденсатора. Результуюча форма хвилі має два імпульси протягом кожного напівперіоду, по одному для кожного вікна діодної провідності.
Мережева напруга змінного струму (рис. 5) випрямляється за допомогою пасивного діодного моста. Це означає, що діоди спрацьовують, коли лінійна напруга більша за напругу на секції конденсатора. Результуюча форма хвилі має два імпульси протягом кожного напівперіоду, по одному для кожного вікна діодної провідності.
Форма хвилі показує деякий безперервний струм, коли провідність переходить від одного діода до наступного. Це типово, коли він використовується у ланці постійного струму приводу і є деяке навантаження. Інвертори використовують широко імпульсну модуляцію для створення вихідних сигналів. Трикутний сигнал генерується на несучій частоті, з якою інвертор IGBT перемикається.
Ця форма сигналу порівнюється із синусоїдальною формою хвилі на основній частоті, яка має бути доведена до двигуна. Результатом є хвильова форма U, показана малюнку.
Вихід інвертора може бути будь-якою частотою нижче або вище за частоту лінії до меж інвертора та/або механічні межі двигуна. Потрібно звернути увагу, що привід завжди працює в межах рейтингу ковзання двигуна.
Процес регулювання запуску
Терміни включення SCR – це ключ до керування виходом напруги для УПП. Протягом запуску логічна схема УПП визначає, коли включити SCR. Він не включає SCR у точці, де напруга йде від негативного до позитивного, але чекає деякий час після цього. Це відомий процес, званий як поступове відновлення SCR. Точка включення SCR встановлена або запрограмована тим, що початковий момент, що крутить, початковий струм або обмеження струму строго регулюється.
 Результат поетапного відновлення SCR є несинусоїдальною зниженою напругою на висновках двигуна, яка показана на малюнках. Оскільки двигун є індуктивним, а струм відстає від напруги, SCR залишається увімкненим і проводить, поки струм не досягне нуля. Це відбувається після того, як напруга стала негативною. Вихід напруги SCR індивідуального.
Результат поетапного відновлення SCR є несинусоїдальною зниженою напругою на висновках двигуна, яка показана на малюнках. Оскільки двигун є індуктивним, а струм відстає від напруги, SCR залишається увімкненим і проводить, поки струм не досягне нуля. Це відбувається після того, як напруга стала негативною. Вихід напруги SCR індивідуального.
Якщо порівнювати з формою повної напруги, можна бачити, що пікова напруга збігається з повною хвильовою напругою. Однак струм не збільшується до того ж рівня, що і при застосуванні повної напруги через індуктивний характер двигунів. Коли ця напруга подається на двигун, вихідний струм виглядає як на малюнку.
Оскільки частота напруги дорівнює як і, як і лінійна, частота струму теж однакова. SCR поетапно переходять до повної провідності, пробіли в струмі заповнюються до тих пір, поки хвильова форма не виглядатиме так само, як у двигуна.
Такий плавний пуск асинхронного електродвигуна на відміну приводу змінного струму, має характеристики струму в мережі і струму двигуна завжди однаковими. Під час запуску зміна струму безпосередньо залежить від величини прикладеної напруги. Крутний момент двигуна змінюється, як квадрат прикладеної напруги або струму.
Найбільш важливим фактором при оцінці є крутний момент двигуна. Стандартні двигуни виробляють приблизно 180% від моменту повного навантаження під час запуску. Отже, 25%-е зниження параметрів дорівнюватиме моменту повного навантаження, що крутить. Якщо двигун споживає 600% від повного струму навантаження під час запуску, то струм у цій схемі зменшить пусковий струм від 600% до 450% навантаження.
Схеми підключення пускачів
 Існує два варіанти, за допомогою яких стартер здійснює запуск електродвигуна: стандартна схемата всередині трикутника.
Існує два варіанти, за допомогою яких стартер здійснює запуск електродвигуна: стандартна схемата всередині трикутника.
Стандартна схема. Пускач з'єднаний послідовно з лінійною напругою, що подається на двигун.
Усередині трикутника існує ще одна схема, за якою підключений пускач, називається схемою внутрішньої дельти. У цій схемі два кабелі, які підключаються до одного з двигунів, приєднуються безпосередньо до джерела живлення I/P, а інший кабель буде підключено через пускач. Одна особливість цієї схеми полягає в тому, що пускач можна використовувати для великих двигунів, наприклад для двигунів потужністю 100 кВт, оскільки фазні струми діляться на 2 частини.
Електродвигуни – найпоширеніші у світі електричні машини. Жодне промислове підприємство, жоден технологічний процесбез них не обходиться. Обертання вентиляторів, насосів, переміщення стрічок конвеєрів, рух кранів – ось неповний, але вже вагомий перелік завдань, які вирішуються за допомогою двигунів.
Однак є один нюанс роботи всіх без винятку електромоторів: у момент старту вони короткочасно споживають великий струм, який називають пусковим.
При подачі напруги на обмотку статора швидкість обертання ротора дорівнює нулю. Ротор потрібно зняти з місця і розкрутити до номінальної частоти обертання. На це витрачається значно більша енергія, ніж потрібна для номінального режиму роботи.
 Під навантаженням пускові струми більші, ніж на холостому ходу. До ваги ротора додається механічний опір обертанню від приводу двигуном в рух механізму. Насправді вплив цього чинника прагнуть мінімізувати. Наприклад, потужні вентилятори на момент запуску автоматично закривають шибери в повітроводах.
Під навантаженням пускові струми більші, ніж на холостому ходу. До ваги ротора додається механічний опір обертанню від приводу двигуном в рух механізму. Насправді вплив цього чинника прагнуть мінімізувати. Наприклад, потужні вентилятори на момент запуску автоматично закривають шибери в повітроводах.
У момент протікання пускового струму з мережі споживається значна потужність, витрачається виведення електродвигуна на номінальний режим роботи. Чим потужніший електромотор, тим більша потужність для розгону йому потрібна. Не всі електричні мережі переносять цей режим без наслідків.
Перевантаження ліній живлення неминуче призводить до зниження напруги в мережі. Це ще більше ускладнює процес запуску електродвигунів, а й впливає інших споживачів.
Та й самі електродвигуни під час пускових процесів зазнають підвищених механічних та електричних навантажень. Механічні пов'язані зі збільшенням крутного моменту на валу. Електричні ж, пов'язані з короткочасним збільшенням струму, впливають на ізоляцію обмоток статора та ротора, контактні з'єднання та пускову апаратуру.
Методи зниження пускових струмів
Малопотужні електромотори з недорогою пускорегулюючою апаратурою цілком гідно запускаються і без будь-яких засобів. Знижувати їх пускові струми або змінювати частоту обертання недоцільно економічно.
Але коли вплив на режим роботи мережі в процесі запуску виявляється суттєвим, пускові струми вимагають зниження. Цього добиваються за рахунок:
- застосування електродвигунів із фазним ротором;
- використання схеми для перемикання обмоток із зірки на трикутник;
- використання пристроїв плавного пуску;
- використання частотних перетворювачів.
До кожного механізму підходить один або кілька зазначених методів.
Електродвигуни із фазним ротором
 Застосування асинхронних електродвигунів з фазним ротором на ділянках роботи з важкими умовами праці – найдавніша форма зниження пускових струмів. Без них неможлива робота електрифікованих кранів, екскаваторів, а також - дробарок, гуркотів, млинів, що рідко запускаються за відсутності продукції в механізмі.
Застосування асинхронних електродвигунів з фазним ротором на ділянках роботи з важкими умовами праці – найдавніша форма зниження пускових струмів. Без них неможлива робота електрифікованих кранів, екскаваторів, а також - дробарок, гуркотів, млинів, що рідко запускаються за відсутності продукції в механізмі.
Зниження пускового струму досягається за рахунок поетапного виведення ланцюга ротора резисторів. Спочатку, в момент подачі напруги, до ротора підключено максимально можливий опір. У міру розгону реле часу один за одним включають контактори, що шунтують окремі секції резистивні. В кінці розгону додатковий опір, включений до ланцюга ротора, дорівнює нулю.
Кранові двигуни не мають автоматичного перемикання сходів із резисторами. Це відбувається за волею кранівника, що пересуває важелі керування.
Перемикання схеми з'єднання обмоток статора
 У брно (блок розподілу початку обмоток) будь-якого трифазного електромотора виведено 6 висновків від обмоток всіх фаз. Таким чином, їх можна з'єднати або в зірку, або в трикутник.
У брно (блок розподілу початку обмоток) будь-якого трифазного електромотора виведено 6 висновків від обмоток всіх фаз. Таким чином, їх можна з'єднати або в зірку, або в трикутник.
Завдяки цьому досягається деяка універсальність застосування асинхронних електродвигунів. Схема включення зіркою розраховується на більший ступінь напруги (наприклад, 660В), трикутником – на менший (у цьому прикладі – 380В).
Але при номінальній напрузі живлення, що відповідає схемі з трикутником, можна скористатися схемою із зіркою для попереднього розгону електромотора. При цьому обмотка працює на зниженій напрузі живлення (380В замість 660) і пусковий струм знижується.
Для управління процесом перемикання буде потрібний додатковий кабель у брно електродвигуна, так як задіюються всі 6 висновків обмоток. Встановлюються додаткові пускачі та реле часу для керування їх роботою.
Частотні перетворювачі
Перші два методи можна застосувати не скрізь. А ось наступні, що стали доступними відносно недавно, дозволяють здійснити плавний запуск будь-якого асинхронного електродвигуна.
Частотний перетворювач - складний напівпровідниковий пристрій, що поєднує силову електроніку та елементи мікропроцесорної техніки. Силова частина випрямляє та згладжує мережеву напругу, перетворюючи її на постійну. Вихідна частина з цієї напруги формує синусоїдальну зі змінюваною частотою від нуля до номінального значення - 50 Гц.
За рахунок цього досягається економія електроенергії: агрегати, що приводяться в обертання, не працюють з надмірною продуктивністю, перебуваючи в строго необхідному режимі. До того ж, технологічний процес отримує можливість тонко налаштовуватися.

Але важливе в спектрі проблеми, що розглядається: частотні перетворювачі дозволяють здійснювати плавний пуск електродвигуна, без поштовхів і ривків. Пусковий струм повністю відсутня.
Пристрої плавного запуску
Пристрій плавного пуску електродвигуна - це частотний перетворювач, але з обмеженим функціоналом. Працює він тільки при розгоні електродвигуна, плавно змінюючи швидкість обертання від мінімально заданого значення до номінальної.
Щоб виключити непотрібну роботу пристрою після закінчення розгону електродвигуна, поруч встановлюється контактор, що шунтує. Він підключає електродвигун безпосередньо до мережі після завершення запуску.
За виконання модернізації устаткування – це найпростіший метод. Він часто може бути реалізований власноруч, без залучення вузькопрофільних фахівців. Пристрій встановлюється на місце магнітного пускача, що управляє пуском електромотора. Може знадобитися заміна кабелю на екранований. Потім пам'ять пристрою вносяться параметри електромотора, і готове до дії.
А ось із повноцінними частотними перетворювачами впоратися самостійно під силу не кожному. Тому їх застосування в одиничних примірниках зазвичай не має сенсу. Установка частотних перетворювачів виправдана лише за проведення загальної модернізації електрообладнання підприємства.
Олександр Ситников (Кіровська обл.)
Розглянута у статті схема дозволяє здійснити ненаголошений пуск та гальмування електродвигуна, збільшити термін служби обладнання та знизити навантаження на електромережу. досягається шляхом регулювання напруги на обмотках двигуна силовими тиристорами.
Пристрої плавного пуску (УПП) широко застосовують у різних електроприводах. Структурна схема розробленого УПП наведена малюнку 1, а діаграма роботи УПП - малюнку 2. Основою УПП є три пари зустрічно-паралельних тиристорів VS1 - VS6, включених у розрив кожної з фаз. Плавний пуск здійснюється за рахунок поступового
збільшення прикладеного до обмоток електродвигуна мережевої напруги від деякого початкового значення Uнач номінального Uном. Це досягається шляхом поступового збільшення кута провідності тиристорів VS1 - VS6 від мінімального значення до максимального протягом часу Тпуск, що називається часом пуску.
Зазвичай значення Uнач становить 30 ... 60% від Uном, тому пусковий момент електродвигуна істотно менше, ніж у разі підключення електродвигуна на повну напругу мережі. При цьому відбувається поступовий натяг приводних ременів та плавне зачеплення зубчастих коліс редуктора. Це сприятливо позначається зниження динамічних навантажень електроприводу і, як наслідок, сприяє продовженню терміну служби механізмів і збільшення інтервалу між ремонтами.
Застосування УПП також дозволяє знизити навантаження на мережу, оскільки в цьому випадку пусковий струм електродвигуна становить 2 - 4 номіналу струму двигуна, а не 5 - 7 номіналів, як при безпосередньому пуску. Це важливо при живленні електроустановок від джерел енергії обмеженої потужності, наприклад, дизель-генераторних установок, джерел безперебійного живлення та трансформаторних підстанцій малої потужності

(особливо у сільській місцевості). Після завершення пуску тиристори шунтуються байпасом (обхідним контактором), завдяки чому протягом часу Траб на тиристорах не розсіюється потужність, а значить, економиться електроенергія.
При гальмуванні двигуна процеси відбуваються у зворотному порядку: після відключення контактора До кут провідності тиристорів максимальний, напруга на обмотках електродвигуна дорівнює мережевому за винятком падіння напруги на тиристорах. Потім кут провідності тиристорів протягом часу Тторм зменшується до мінімального значення, якому відповідає напруга відсікання Uотс, після чого кут провідності тиристорів стає рівним нулю і напруга на обмотки не подається. На малюнку 3 наведено діаграми струму однієї з фаз двигуна при поступовому збільшенні кута провідності тиристорів.

На малюнку 4 наведено фрагменти принципової електричної схемиУВП. Цілком схема наведена на сайті журналу. Для її роботи потрібна напруга трьох фаз А, В,
З стандартної мережі 380 В частотою 50 Гц. Обмотки електродвигуна при цьому можуть бути з'єднані як зіркою, так і трикутником.Як силові тиристори VS1 - VS6 застосовані недорогі прилади типу 40TPS12 в корпусі ТО-247 з прямим струмом Iпр = 35 А. Допустимий струм через фазу становить Iдоп = 2Iпр = 70 А. Будемо вважати, що максимальний пусковий струм становить 4Iном, що іншим< Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Паралельно тиристорам підключені демпфуючі RC-ланцюжка R48, C20, C21, R50, C22, C23, R52, C24, C25, що запобігають помилкове включення тиристорів, а також варистори R49, R51 і R53, поглинаючі імпульси 01, переміщують імпульси. К2, К3 типу TR91-12VDC-SC-C з номінальним струмом 40 А шунтують силові тиристори після завершення пуску.
Живлення системи управління здійснюється від трансформаторного блоку живлення, запитаного від міжфазної напруги Uав. У блок живлення входять понижуючі трансформатори TV1, TV2, діодний міст VD1, струмообмежуючий резистор R1, конденсатори, що згладжують С1, С3, С5, перешкододавлюючі конденсатори С2, С4, С6 і лінійні стабілізатори DA1 і DA2, що забезпечують напругу 12 і 5 відповідно.
Система управління побудована із застосуванням мікроконтролера DD1 типу PIC16F873. Мікроконтролер видає імпульси управління тиристорами VS1 - VS6 шляхом «запалювання» оптосимісторів ОРТ5-ОРТ10 (MOC3052). Для обмеження струму в ланцюгах управління тиристорів VS1 – VS6 служать резистори R36 – R47. Імпульси управління подаються одночасно на два тиристори із затримкою щодо початку напівхвилі міжфазної напруги. Ланцюги синхронізації з мережевою напругоюскладаються з трьох однотипних вузлів, що складаються із зарядних резисторів R13, R14, R18, R19, R23, R24, діодів VD3 - VD8, транзисторів VT1 - VT3, накопичувальних конденсаторів С17 - С19 та оптопар OPT2 - OPT. З виходу 4 оптопар OPT2, OPT3, OPT4 на входи мікроконтролера RC2, RC1, RC0 надходять імпульси тривалістю приблизно 100 мкс, відповідні початку негативної напівхвилі фазних напруг Uab, Ubc, Uca.
Діаграми роботи вузла синхронізації наведені на малюнку 5. Якщо прийняти верхній графік за мережну напругу Uав, то середній графік відповідатиме напругі на конденсаторі С17, а нижній - струму через фотодіод оптопари ОРТ2. Мікроконтролер реєструє синхроімпульси, що надходять на його входи, визначає наявність, порядок чергування, відсутність «злипання» фаз, а також проводить розрахунок часу затримки імпульсів управління тиристорами. Входи ланцюгів синхронізації захищені від перенапруги варисторами R17, R22 та R27.
За допомогою потенціометрів R2, R3, R4 задаються параметри, які відповідають діаграмі роботи УПП, наведеної на малюнку 2; відповідно R2 - Tпуск, R3 - Тторм, R4 - Uначі Uотс. Напруги уставок з двигунів R2, R3, R4 надходять на входи RA2, RA1, RA0 мікросхеми DD1 і перетворюються за допомогою АЦП. Час пуску та гальмування регулюється в межах від 3 до 15 с, а початкова напруга - від нуля до напруги, що відповідає куту провідності тиристора 60 електричних градусів. Конденсатори С8 - С10 - завадодавні.
Команда " ПУСК " подається шляхом замикання контактів 1 і 2 роз'єму XS2, при цьому на виході 4 оптопари OPT1 з'являється лог. 1; конденсатори С14 і С15 роблять придушення коливань, що виникають внаслідок „брязкоту“ контактів. Розімкнутому положенню контактів 1 і 2 роз'єму XS2 відповідає команда „СТОП“. Комутацію ланцюга керування запуском можна реалізувати кнопкою із фіксацією, тумблером або контактами реле.
Силові тиристори захищені від перегріву термостатом B1009N із нормально-замкнутими контактами, які розміщені на тепловідводі. При досягненні температури 80°З контакти термостата розмикаються, і вхід RC3 мікроконтролера надходить рівень балка. 1, що свідчить про перегрівання.
Світлодіоди HL1, HL2, HL3 є індикаторами наступних станів:
- HL1 (зелений) «Готовність» – відсутність аварійних станів, готовність до запуску;
- HL2 (зелений) «Робота» - миготливий світлодіод означає, що УПП здійснює пуск або гальмування двигуна, постійне свічення - робота на байпасі;
- HL3 (червоний) «Аварія» - свідчить про перегрівання тепловідведення, відсутність або „злипання“ фазних напруг.
Включення обхідних реле К1, К2, К3 здійснюється шляхом подачі мікроконтролером балка. 1 з урахуванням транзистора VT4.
Програмування мікроконтролера – внутрішньосхемне, для чого використовується роз'єм XS3, діод VD2 та мікроперемикач Дж1. Елементи ZQ1, C11, C12 утворюють ланцюг запуску тактового генератора, R5 і С7 - ланцюг скидання харчування, С13 здійснює фільтрацію перешкод по шинах живлення мікроконтролера.
На малюнку 6 наведено спрощений алгоритм роботи УПП. Після ініціалізації мікроконтролера викликається підпрограма Error_Test, яка визначає наявність аварійних ситуацій: перегрів тепловідведення, неможливість синхронізуватися з мережевою напругою внаслідок втрати фази, неправильного підключення до мережі або сильних перешкод. Якщо аварійна ситуація не фіксується, змінній Error присвоюється значення «0 », після повернення з підпрограми запалюється світлодіод „Готовність“, і схема переходить у режим очікування команди „ПУСК“. Після реєстрації команди „ПУСК“ мікроконтролер здійснює аналого! цифрове перетворення напруг уставок
на потенціометрах і розрахунок параметрів Тпуск та Uнач, після чого видає імпульси керування силовими тиристорами. Після закінчення пуску вмикається байпас. При гальмуванні двигуна процеси управління виконуються у зворотному
порядку.
Особливості конструкції деяких інструментів, наприклад, кутової шліфувальної машини, спричиняють високому впливуна двигун пристрою динамічних навантажень. Для усунення нерівномірних навантажень на електроприлад та його складові рекомендується купувати або зробити своїми руками пристрій плавного пуску (УПП).
Загальна інформація
В електроінструментах, в яких робоча частина представлена диском, що обертається з високою швидкістю, на початку роботи на вісь редуктора впливають сили інерції. Цей вплив спричиняє наступні негативні моменти:
- Інерційний ривок, створений в результаті навантаження на вісь при різкому старті, може вирвати агрегат з рук, тим більше якщо використовуються великі в діаметрі і масі диски;
Важливо!Через такі інерційні ривки при роботі зі сталевими та алмазними дисками необхідно тримати інструмент двома руками і бути готовим до його утримання, тому що в іншому випадку можна травмуватися при зриві агрегату.
- Різке надходження робочої напруги на двигун створює велике навантаження по струму, яка відбувається після того, як агрегат набрав мінімальне значення оборотів. Це тягне до перегріву обмоток мотора та швидкого зносу щіток. Часте увімкнення та вимикання інструменту може призвести до короткого замикання, оскільки існує висока ймовірність оплавлення ізоляційного шару обмоток;
- Різкий набір обертів УШМ або дискової пилки через великий момент, що крутиться, призводить до швидкого зношування шестірні редуктора. Іноді можливе заклинювання редуктора або навіть відламування зубів;
- Перевантаження, що сприймає на собі під час різкого запуску робочого диска, можуть призвести до його руйнування. Присутність захисного кожуха на подібних електроінструментах є обов'язковою.
Важливо!При запуску болгарки відкрита ділянка кожуха повинна знаходитися в протилежному боці від людини, щоб захистити її від осколків, що летять, при можливому руйнуванні робочого диска.
Для скорочення згубних впливів різкого та динамічного пуску на електроінструмент виробники випускають моделі із вбудованим плавним пуском та регулюванням оборотів.

Для інформації.Подібні пристрої вбудовуються в агрегати із середньої та високої цінової категорії.
Пристрій плавного пуску та регулятор оборотів відсутні у багатьох примірниках електроінструменту, який є у більшості домашніх господарств. Якщо придбати потужну техніку (діаметр робочого диска більше 20 см) без УПП, різкий пуск двигуна спричинить швидке зношування механіки та електрочастини, також такий агрегат складно утримати в руках при включенні. Встановлення УПП – це єдиний вихід.
На ринку комплектуючих до електроінструменту представлено багато моделей готових блоків плавного пуску та оборотних регуляторів.

Готовий пристрій плавного пуску для електроінструменту можна монтувати як всередину корпусу за наявності вільного місця, так і підключати до кабелю живлення. Однак можна не купувати готовий виріб, а виготовити його своїми руками, тому що схема цього пристрою досить проста.
Самостійне виготовлення УПП
Для виготовлення найпопулярнішого пристрою плавного пуску для електроінструменту на основі плати КР1182ПМ1Р знадобляться наступні інструменти та матеріали:
- паяльник із припоєм;
- мікросхема фазового регулювання КР1182ПМ1Р;
- резистори;
- конденсатори;
- симістори;
- інші допоміжні елементи.

У пристрої, яке отримано за схемою вище, управління відбувається за допомогою плати КР1182ПМ1Р, а симістори виступають як силова частина.

Перевагами даного складання УПП є такі ознаки:
- простота виготовлення;
- відсутність необхідності у додаткових налаштуваннях після збирання УПП;
- пристрій плавного пуску можна монтувати в будь-який тип і модель електроінструменту, що розрахований на змінну електронапругу в 220 В;
- відсутність вимог до винесення окремої живильної кнопки - доопрацьований агрегат приводиться в дію штатною клавішею;
- можливість встановлення такого блоку всередину обладнання або розрив кабелю живлення з власним корпусом;
- виготовити подібне пристосування може будь-хто домашній майстер, який має основи паяння та читання мікросхем.
Рекомендація.Найпрактичнішим варіантом підключення УПП є приєднання його до розетки, яка є джерелом живлення для електроінструменту. Для цього потрібно на вихід пристрою (гніздо XS1 на схемі) підключити розетку живлення, а на вхід (гніздо ХР1 на схемі) подати живлення напругою 220В.
Принцип роботи УВП
Принцип роботи такого блоку плавного пуску, встановленого в болгарку, складається з наступних процесів:
- Після натискання кнопки запуску на болгарці напруга подається на мікросхему;
- На керуючому конденсаторі (С2) відбувається процес плавного наростання електронапруги: у міру заряду цього елемента воно досягає робочих показників;
- Тиристори, що у складі керуючої плати, відкриваються із затримкою, що залежить від часу повного заряду конденсатора;
- Симистор (VS1) перебуває під керуванням тиристорами та відкривається з тією самою затримкою;
- У кожній половині періоду змінної напруги така пауза зменшується, що веде до його плавної подачі на вхід робочого агрегату;
- Після вимкнення болгарки конденсаторний елемент розряджається опором резистора.
Саме вищеописані процеси визначають плавний пуск болгарки, що дозволяє виключити інерційний шок для редуктора з допомогою поступового зростання обертів диска.
Час, за який електроінструмент набере робочу кількість обертів, визначається лише ємністю конденсатора, що управляє. Якщо, наприклад, конденсаторний елемент матиме ємність 47 мкФ, то плавний пуск забезпечуватиметься за 2-3 секунди. Такого часу достатньо для того, щоб початок використання інструменту відбувався комфортно, а він сам не зазнавав шокових навантажень.
Якщо резистор має опір, що дорівнює 68 кОм, то час розряду конденсатора становитиме приблизно 3 секунди. Після цього тимчасового проміжку пристрій плавного пуску повністю готове до чергового циклу запуску електроінструменту.
На замітку. Ця схемаможе бути піддана невеликій доробці, яка додасть до пристрою плавного пуску ще функцію регулятора оборотів. Для цього потрібно змінити стандартний резистор (R1) на змінний варіант. Контролюючи опір, можна регулювати потужність електродвигуна, змінюючи кількість його оборотів.
Інші елементи схеми призначені для наступного:
- резистор (R2) відповідає за контроль величини сили електроструму, що протікає через вхід симістора;
- конденсатор (С1) – один із додаткових компонентів системи управління платою КР1182ПМ1Р, що використовується в типовому варіантісхеми включення

Поради щодо збирання конструкції та вибору матеріалів:
- Простоту монтажу та компактність майбутнього виробу можна забезпечити припаюванням конденсуючих елементів та резисторів безпосередньо до ніжок керуючої плати;
- Симистор необхідно вибирати з мінімальним пропускним електрострумом 25 А та електронапругою не більше 400 В. Величина електроструму повністю залежатиме від показника потужності двигуна електроінструменту;
- Через плавний пуск агрегату струм не буде більшим за номінальні показники, які встановлені виробником. У деяких випадках, наприклад, заклинювання робочого диска болгарки, може знадобитися додатковий запас електроструму, відповідно, краще вибрати симистор з робочим струмом, який дорівнює подвійному значенню номінального показника інструменту;
- Потужність УШМ чи іншого виду інструменту під час роботи з пристроєм плавного пуску за схемою КР1182ПМ1Р має перевищувати 5 000 Вт. Така умова зумовлена особливостями роботи плати.
Також існують і інші схеми плавного пуску для електроінструментів та різноманітних двигунів, які разюче відрізняються один від одного за всіма параметрами: від способу монтажу та зовнішнього виглядудо методу підключення та складових компонентів.
До відома.Вищеописана схема є найпростішою і застосовується повсюдно, оскільки довела свою працездатність і надійність.
Пристрій плавного пуску для електроінструменту – економія коштів на ремонті та повний захист основних компонентів приладу. Перед кожним стоїть вибір: купувати УПП чи зробити самостійно. Якщо є деякі знання в електротехніці і пайці радіодеталей, то рекомендується виконати самостійну збірку, оскільки вона надійна і проста. В іншому випадку слід придбати в будь-якому спеціалізованому магазині або на радіоринку готове пристрій плавного пуску електроінструменту.
Відео