Що таке динамічне ланка? На попередніх заняттях ми розглядали окремі частини системи автоматичного управління і називали їх елементами системи автоматичного управління. Елементи можуть мати різний фізичний вигляд і конструктивне оформлення. Головне, що на такі елементи подається деякий вхідний сигнал х ( t ) , І як відгук на цей вхідний сигнал, елемент системи управління формує певний вихідний сигнал у ( t ) . Далі ми встановили, що зв'язок між вихідним і вхідним сигналами визначається динамічними властивостями елемента управління, які можна представити у вигляді передавальної функції W (s). Так ось, динамічним ланкою називається будь-який елемент системи автоматичного управління, що має певне математичний опис, тобто для якого відома передатна функція.

Мал. 3.4. Елемент (а) і динамічне ланка (б) САУ.
Типові динамічні ланки- це мінімально необхідний набір ланок для опису системи управління довільного виду. До типових ланок відносяться:
пропорційне ланка;
апериодическое ланка I-ого порядку;
апериодическое ланка II-ого порядку;
коливальний ланка;
інтегруюча ланка;
ідеальне дифференцирующее ланка;
форсує ланка I-ого порядку;
форсує ланка II-ого порядку;
ланка з чистим запізненням.
пропорційне ланка
Пропорційне ланка інакше ще називається безінерційним .
1. Передавальна функція.
Передавальна функція пропорційного ланки має вигляд:
W(s) = Kде К - коефіцієнт посилення.
Пропорційне ланка описується алгебраїчним рівнянням:
у (t) = K· х (t)
Прикладами таких пропорційних ланок можуть служити, важільний механізм, жорстка механічна передача, редуктор, електронний підсилювач сигналів на низьких частотах, дільник напруги і ін.



4. Перехідна функція .
Перехідна функція пропорційне ланки має вигляд:
h (t) = L -1 = L -1 = K· 1 (t)
5. Вагова функція.
Вагова функція пропорційного ланки дорівнює:
w (t) = L -1 = K· Δ (t)



Мал. 3.5. Перехідна функція, вагова функція, АФЧХ і АЧХ пропорційного ланки .
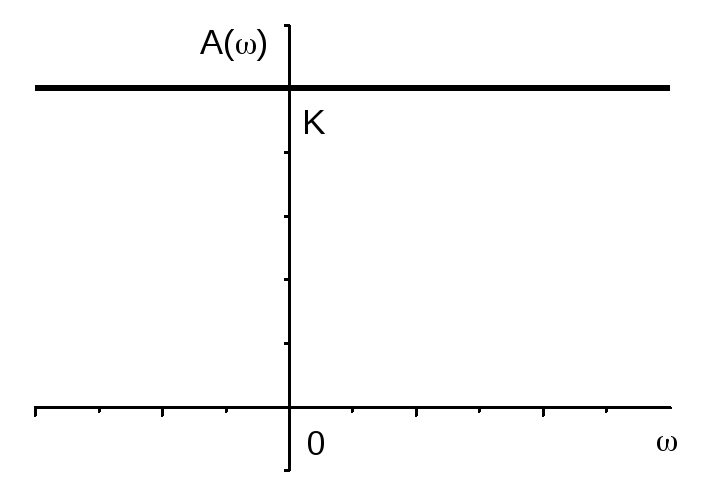
6. Частотні характеристики .
Знайдемо АФЧХ, АЧХ, ФЧХ і Лах пропорційного ланки:
W (jω ) = K = K +0· j
A (ω
)
=
 = K
= K
φ (ω) = arctg (0 / K) = 0
L (ω) = 20 · lg = 20 · lg (K)
Як випливає з представлених результатів, амплітуда вихідного сигналу не залежить від частоти. Насправді жодна ланка не в змозі рівномірно пропускати всі частоти від 0 до ¥, як правило на високих частотах, коефіцієнт посилення стає менше і прагнути до нуля при ω → ∞. Таким чином, математична модель пропорційного ланки є деякою ідеалізацією реальних ланок .
апериодическое ланка I -ого порядку
Апериодические ланки інакше ще називаються інерційними .
1. Передавальна функція.
Передавальна функція аперіодичної ланки I-ого порядку має вигляд:
W(s) = K/(T· s + 1)
де K - коефіцієнт підсилення; T - постійна часу, що характеризує інерційність системи, тобто тривалість перехідного процесу в ній. оскільки постійна часу характеризує певний часовий інтервал , То її величина повинна бути завжди позитивною, тобто (T> 0).
2. Математичний опис ланки.
Апериодическое ланка I-ого порядку описується диференціальним рівнянням першого порядку:
T· dу (t)/ dt+ У (t) = K· Х (t)
3. Фізична реалізація ланки.
Прикладами аперіодичної ланки I-ого порядку можуть служити: електричний RC-фільтр; термоелектричний перетворювач; резервуар з стисненим газом і т.п.



4. Перехідна функція .
Перехідна функція аперіодичної ланки I-ого порядку має вигляд:
h (t) = L -1 = L -1 = K - K · e -t / T = K · (1 - e -t / T )


Мал. 3.6. Перехідна характеристика аперіодичного ланки I-го порядку.
Перехідний процес аперіодичної ланки I-ого порядку має експонентний вигляд. Стале значення одно: h вуст = K. Дотична в точці t = 0 перетинає лінію сталого значення в точці t = T. У момент часу t = T перехідна функція приймає значення: h (T) ≈ 0.632 · K, тобто за час T перехідна характеристика набирає тільки близько 63% від сталого значення.
визначимо час регулювання T у для аперіодичної ланки I-ого порядку. Як відомо з попередньої лекції, час регулювання - це час, після якого різниця між поточним і сталим значеннями не перевищуватиме певної заданої малої величини Δ. (Як правило, Δ задається як 5% від сталого значення).
h (T у) = (1 - Δ) · h вуст = (1 - Δ) · K = K · (1 - e - T у / T), звідси і - T у / T = Δ, тоді T у / T = -ln (Δ), В результаті отримуємо T у = [-ln (Δ)] · T.
При Δ = 0,05 T у = - ln (0.05) · T ≈ 3 · T.
Іншими словами, час перехідного процесу аперіодичної ланки I-ого порядку приблизно в 3 рази перевищує постійну часу.
Всі елементи системи незалежно від їх конструктивного виконання і призначення за своїми динамічними властивостями можна поділити на обмежене число типових динамічних. Під типовим динамічним ланкою розуміють елемент системи спрямованої дії, що описується в динаміці диференціальним рівнянням не вище другого порядку або алгебраїчним рівнянням. Класифікують ланки саме по виду рівняння динаміки.
Всі ланки можна розділити на два типи: мінімально-фазові і немінімально-фазові.
Ланка є немінімально-фазовим, якщо його передавальна функція має позитивні нулі або полюса, у таких ланок фазова характеристика не відповідає диференціальних рівнянь. Для мінімально-фазових ланок фазочастотная характеристика однозначно визначається амплітудно-частотної характеристикою.
Динамічні ланки можуть бути стійкими, якщо після застосування і зняття впливу його вихідна змінна прагне до значення до моменту прикладення впливу (тобто повертається в початковий стан); нейтральними (астатичними), якщо при східчастому вплив вихідна змінна змінюється з постійною швидкістю (астатизм першого порядку) або постійним прискоренням (астатизм другого порядку); а після програми та зняття впливу приходить в новий стійкий стан; нестійкі, якщо вихідна змінна після програми та зняття обурення змінюється, не приходячи до деякого стійкого стану.
Розглянемо мінімально-фазові ланки. За типом рівнянь динаміки їх можна класифікувати наступним чином.
Найпростіші ланки: а) безінерційною (підсилююче, пропорційне); б) ідеально-інтегруючий, ідеально-дифференцирующее;
Ланки першого порядку: а) інерційну ланку першого порядку (апериодическое); б) форсує ланка; в) реально-дифференцирующее ланка першого порядку; г) інтегро-дифференцирующее (інерційно-форсує) першого порядку.
Ланки другого порядку: а) апериодическое (інерційне) ланка другого порядку; б) коливальний; в) консервативне.
Особливі ланки: ланка запізнювання і ірраціональні ланки.
Розглянемо типові ланки, їх рівняння динаміки, передавальні функції і характеристики.
§1. Найпростіші ланки.
1) безінерційні ланка.
Вихідний сигнал цієї ланки за формою повторює вхідний сигнал. рівняння динаміки
K - коефіцієнт пропорційності, який може бути визначений за статичній характеристиці

Рівняння ланки в зображеннях
і передавальна функція
Отримаємо, замінивши в вираженні передавальної функції оператор Лапласа p на оператор Фур'є jщ.
(Реакція на ступінчастий сигнал)

малюнок 3.1
Реакція на імпульс
Ланка стійке.
АФЧХ отримаємо змінюючи частоту від нуля до нескінченності. З виразу W (jщ) видно, що комплексний коефіцієнт підсилення не залежить від частоти і не буде зміщення вектора W (jщ). Таким чином АФЧХ цієї ланки є точкою на дійсній осі, що відстоїть на відстань K від початку координат.

малюнок 3.2
Логарифмічні амплітудно і фазочастотную характеристики:
Таким чином ЛАЧХ пройде паралельно осі частот на відстані від неї (20 Lg K) визначаються коефіцієнтом передачі, фазовий зсув у всьому діапазоні частот дорівнює нулю.

малюнок 3.3
Приклади безінерційних ланок: зубчаста передача, важільна передача, дільник напруги, підсилювач.
2) Ідеально-інтегруюча ланка.
Вихідний сигнал цієї ланки дорівнює інтегралу від вхідного, рівняння динаміки має наступний вигляд:

Де - час інтегрування.
Передавальна функція ланки
Перейдемо до вираження комплексного коефіцієнта передачі:
Тимчасові характеристики:
а) перехідна функція і характеристика
малюнок 3.4
б) функція ваги і імпульсна перехідна характеристика



малюнок 3.5
За імпульсної перехідної характеристиці видно, що ланка Астатичне (астатизм першого порядку), після зняття обурення вихідна змінна приходить до нового сталого значення.
Частотні характеристики.
Амплітудно-фазова частотна характеристика
являє собою негативний відрізок уявної півосі.

малюнок 3.6
Логарифмічні частотні характеристики.
ЛАЧХ визначається виразом
і являє собою пряму з негативним кутовим коефіцієнтом. При щ = 1, точка перетину з віссю lg відповідає рівнянню
20lgK - 20lg = 0, lg = lg K, тобто = K.
Тому її можна побудувати розрахувавши значення L (= 1) = 20lgK і через цю точку провести пряму з нахилом -20дБ / дек, або через точку lg = lgK.

малюнок 3.7
Рівняння фазової характеристики, тобто фазовий зсув, постійний і не залежить від частоти, а характеристика ФЧХ паралельна осі частот.
Нахил ЛАЧХ -20дб / дек означає, що зі збільшенням частоти в 10 разів (1 декада) модуль амплітудної характеристики зменшується на 20 Дб (в 10 разів).
Приклади ланки:
3) Ідеально-дифференцирующее ланка.
Вихідний сигнал цієї ланки пропорційний швидкості зміни вхідного сигналу і рівняння ланки
Рівняння в зображеннях
Передавальна функція ланки
Комплексний коефіцієнт передачі
тимчасові характеристики
а) перехідна функція і характеристика

малюнок 3.9
б) функція вага і імпульсна перехідна характеристика
Два імпульсу протилежної полярності.
Частотні характеристики.
АФЧХ будується за висловом і являє собою позитивний відрізок уявної осі. .

малюнок 3.10
логарифмічні характеристики
ЛАЧХ будується за висловом і являє собою пряму з позитивним кутовим коефіцієнтом, вона перетинає вісь lgщ в точці
На частоті щ = 1 L (щ) = 20lgK.
Таким чином, ЛАЧX можна побудувати розрахувавши точку і відклавши її на осі lgщ провести пряму з нахилом + 20Дб / дек або через точку (при щ = 1) 20lgK з тим же нахилом.

малюнок 3.11
нахил + 20Дб / дек, означає, що зі збільшенням частоти в 10 разів модуль амплітудної характеристики збільшується на 20Дб (в 10 разів).
Рівняння фазової характеристики - тобто фазовий зсув не залежить від частоти і ФЧХ проходить паралельно осі lgщ через позначку + 90є.
§2. Ланки першого порядку.
Апериодическое (інерційне) ланка першого порядку.
Ця ланка в динаміці описується диференціальним рівнянням першого порядку.
де T - постійна часу, що характеризує інерційні властивості ланки;
K - коефіцієнт пропорційності, характеризує статизм ланки (коефіцієнт статизму).
Запишемо рівняння в зображеннях
передавальна функція;
Заміною p на jщ перейдемо до комплексного коефіцієнту передачі
Тимчасові характеристики ланки
а) Перехідна функція і характеристика
Рівняння експоненти;
Корінь характеристичного рівняння> Tp +1 = 0


малюнок 3.13
Відповідно до рівняння перехідної характеристики h (t = T) = 0,63K, тобто за час дорівнює одній постійної часу вихідна змінна досягає 0,63 від сталого значення h (?).
h (t = 3T) = 0,95 h (?); h (t = 4T) = 0,98 h (?), тобто перехідний процес за час рівне 4T можна вважати завершеним (tпер = (3ч4) T).
Постійну часу можна визначити за графіком h (t) (як показано на малюнку) використовуючи властивість експоненти - проекція під дотичній на лінію сталого значення дорівнює постійної часу або визначаючи час за яке h (t) досягає значення 0,63 h (?).

малюнок 3.14
Відповідно до виду тимчасових характеристик ланка є стійким.
Частотні характеристики.
Амплітудно-фазова частотна характеристика будується за висловом при зміні частоти 0< щ < ?. АФЧХ этого звена согласно уравнению, представляет собой полуокружность диаметром K, расположенную в четвертом квадранте.

малюнок 3.15
При збільшенні частоти вектор W (jщ) зміщується за годинниковою стрілкою і фазовий зсув змінюється нуля до -90є.
Логарифмічні характеристики.
Зазвичай будують асимптотические ЛАЧХ, які представляють собою ламані лінії і дуже легко розраховуються. На низьких частотах, другий доданок у виразі (*) дуже мало і його можна не враховувати, при другий доданок дає значення 10lg2 = 3,01, а при збільшенні частоти його внесок зростає.
Тому асимптотическую ЛАЧХ будують таким чином:
для частоти за рівнянням - пряма паралельна осі частот;
для похилу лінію з нахилом -20 Дб / дек. Помилка на частоті дорівнює 3дБ, тобто точна L (щ) на цій частоті проходить нижче на 3дБ (показана пунктиром).

малюнок 3.16
фазова характеристика
Приклади ланки:
Диференціальним рівнянням першого порядку описуються перехідні процеси в магнітному підсилювачі (інерційний підсилювач), теплові процеси, процеси розчинення і осадження та інші технологічні процеси.
Інші ланки першого порядку можна розглядати як з'єднання найпростіших ланок і ланки апериодического або як з'єднання найпростіших ланок.
Форсує ланка.

малюнок 3.19
K1 - розмірний коефіцієнт (сек.), K2 - безрозмірний.
тобто вихідний сигнал пропорційний вхідному і швидкості його зміни.
Комплексний коефіцієнт передачі

Тимчасові характеристики ланки
а) перехідна функція і характеристика

малюнок 3.20
б) функція ваги і імпульсна перехідна характеристика

малюнок 3.21
ланка стійке
частотні характеристики
Амплітудно-фазова частотна характеристика будується за висловом
при зміні частоти 0< щ < ? и представляет собой вертикальную прямую отстоящую от начала коорлинат на величину K.

малюнок 3.22
Логарифмічна амплітудно-частотна характеристика>
Асимптотична ЛАЧХ - ламана лінія, на першій ділянці до - пряма паралельна осі частот і віддалена від неї на відстань 20lgK, на частоті відбувається злам і далі характеристика проходить з нахилом +20 Дб / дек.

малюнок 3.23
Реально-дифференцирующее ланка
Ця ланка можна розглядати як послідовне з'єднання ідеально-дифференцирующего ланки і апериодического першого порядку або як зустрічно-паралельне з'єднання безінерційного і ідеально-інтегруючого ланок.
Диференціальне рівняння ланки
Рівняння в зображеннях і передавальна функція
Комплексний коефіцієнт передачі

Тимчасова характеристика ланки
а) перехідна функція і характеристика
тобто аналогічна функції ваги аперіодичної ланки першого порядку.

малюнок 3.26
б) функція ваги і імпульсна перехідна характеристика.

малюнок 3.27
Частотні характеристики.
Амплітудно-фазова частотна характеристика при 0< щ < ?, представляет собой полуокружность диаметром в первом квадранте.

малюнок 3.28
Логарифмічна асимптотична амплітудно-частотна характеристика є ламаною лінією, до - нахил +20 Дб / дек далі пряма паралельна осі частот.
і може бути отримана як сума ЛАЧХ двох послідовно з'єднаних апериодического і ідеально-дифференцирующего ланки.

малюнок 3.29
Інерційно-форсує (інтегро-дифференцирующее) ланка.
Може бути отримано як послідовне з'єднання аперіодичного першого порядку і форсує ланки або зустрічно-паралельного з'єднання підсилювача і аперіодичної ланки першого порядку.

Диференціальне рівняння ланки:
Рівняння в зображеннях і передавальна функція
Комплексний коефіцієнт передачі

Властивості цієї ланки залежать від співвідношення постійних часу, якщо< 1 то звено по своим свойствам приближается к инерционному звену, а если >1 - до диференціюються.
Тимчасові характеристики ланки.
а) перехідна функція і характеристики.

малюнок 3.34
б) функція ваги і імпульсна перехідна характеристика.

малюнок 3.35
Частотні характеристики ланки.
Амплітудно-фазова частотна характеристика будується за висловом при зміні частоти від нуля до нескінченності і вид її також залежить від співвідношення.

малюнок 3.36
Логарифмічні характеристики асимптотична амплітудна також є ламані лінії і залежать від коефіцієнта в.

малюнок 3.37
Немінімально-фазові ланки
Ланка є немінімально-фазовим ланкою, якщо зсув по фазі при 0< щ < ? превышает максимально возможное значение для данного типа уравнения динамики.
Ланка є немінімально-фазовим, якщо його W (p) має позитивний нуль або полюс (корінь полінома чисельника або знаменника). Однієї і тієї ж АЧХ ланки може відповідати різні ФЧХ.
Сталий немінімально-фазовий інерційну ланку першого порядку
рівняння:
маємо позитивний нуль
Корінь позитивне число.
при 0< щ < ?, ц(щ) меняется от 0 до -180є.
Тимчасові характеристики.
при T2> T1

малюнок 3.38
Частотні характеристики: АФЧХ T2> T1

малюнок 3.39
ЛАЧХ - - рівняння таке ж як у інерційно-форсує ланки.

малюнок 3.40
Апериодическое нестійке немінімально-фазовий ланка.
рівняння:

Початок о третьому квадраті.


малюнок 3.41
ЛАЧХ - - як у апериодического стійкого.

малюнок 3.42
Нестійкий немінімально-фазовий ланка другого порядку.
рівняння:

Частотні характеристики - розходяться коливання.

малюнок 3.43
ЛАЧХ - рівняння як у коливального ланки.

малюнок 3.44
про< 0,3 - использовать номограммы поправок.
До немінімально-фазовим відносяться ланки:
нестійкий
нестійкий
сталий
та інші.
Особливу ланка (також немінімально-фазовий)
Ланка запізнювання (чистого запізнювання)
рівняння:

Чи не залежить від щ.
ц (щ) при зміні частоти змінюється від 0 до - ?.
Тимчасові характеристики. Ланка повторює вхідний сигнал без спотворення, але зі зсувом у часі:

малюнок 3.45
Частотні характеристики:
АФЧХ - окружність першого радіуса.

малюнок 3.46
ЛАЧХ - - збігається з віссю частот, а ц (щ) - від 0 до - ?.

малюнок 3.47
Приклади ланок: пристрої зчитування і запису інформації, довгі лінії електропередачі, гідротрубопроводи, транспортні лінії.
Алгоритмічні ланки, які описуються звичайними диференціальними рівняннями першого і другого порядку, отримали назву типових динамічних ланок .
Типові динамічні ланки є основними складовими частинами алгоритмічних структур безперервних систем управління, знання їх характеристик істотно полегшує аналіз таких систем.
Класифікацію зручно здійснити, розглядаючи різні приватні форми диференціального рівняння:
|
 2Т 2 статична
2Т 2 статична -переважають
-переважають -переважають
-переважаютьЛанки, у яких а 2  0 і в 1
0 і в 1  0 володіють статизмом, тобто однозначною зв'язком між вхідний і вихідний змінними в статичному режимі. Ланки - статичні, або позиційні.
0 володіють статизмом, тобто однозначною зв'язком між вхідний і вихідний змінними в статичному режимі. Ланки - статичні, або позиційні.
Ланки, у яких 2 з трьох коефіцієнтів а 2  0, а 1
0, а 1  0, а 0
0, а 0  0, мають інерційністю (уповільненням).
0, мають інерційністю (уповільненням).
У ланок 1,5,7 тільки 2 коефіцієнта  0. Вони є найпростішими, або елементарними. Всі інші типові ланки можуть бути утворені з елементарних шляхом послідовного, паралельного і зустрічно паралельного з'єднання.
0. Вони є найпростішими, або елементарними. Всі інші типові ланки можуть бути утворені з елементарних шляхом послідовного, паралельного і зустрічно паралельного з'єднання.
апериодическое ланка
Динаміка процесу описується наступним рівнянням:

де k передавальний коефіцієнт або коефіцієнт посилення, Т постійна часу, що характеризує інерційність ланки.
1 . Перехідна характеристика:
. Перехідна характеристика:

1)

2) В точці нуль будують дотичну перехідною характеристики, визначають точку перетину з лінією k. Абсциса цієї точки і є постійна часу.
2. Імпульсна перехідна характеристика, або функція ваги, ланки може бути отримана шляхом диференціювання функції h(t) :


3. Передавальна функція:
П


Структурна схема ланки при цьому буде виглядати наступним чином:
Підставляючи в передавальну функцію p= j , Отримаємо амплітудно-фазо-частотну функцію:


5 . АЧХ:
. АЧХ:
Графік АЧХ будується по точках:


тут з- частота сполучення.
Гармонійні сигнали малої частоти ( < з) Пропускаються ланкою добре - з відношенням амплітуд вихідний і вхідний величин, близьким до передавального коефіцієнта k. Сигнали великої частоти ( > з) Погано пропускаються ланкою: ставлення амплітуд істотно< коэффициента k. Чим більше постійна часу Т, Тобто чим більше інерційність ланки, тим менше АЧХ витягнута уздовж осі частот, або, тим уж смуга пропускання частот.
Т.ч. інерційну ланку першого порядку за своїми частотними властивостями є фільтром низької частоти .
ФЧХ інерційної ланки першого порядку дорівнює:



Чим більше частота вхідного сигналу, тим більше відставання по фазі вихідної величини від вхідних. Максимально можливе відставання одно 90 0. при частоті з = 1/ Тзсув фаз дорівнює -45 0.
Розглянемо тепер ЛАЧХ ланки. Точна ЛАЧХ описується виразом:
При побудові ЛАЧХ аперіодичної ланки вдаються до асимптотичних методів або, іншими словами, будують асимптотический графік ЛАЧХ.

Значення сопрягающей частоти w c, при якій перетинаються обидві асимптоти, знайдемо з умови


Подивимося, що буде при побудові НЕ асимптотической, а точної ЛАЧХ:


Точна характеристика (ЛАЧХ) в точці зрізу буде менше асимптотической ЛАЧХ на величину  .
.
Існує так зване нестійке апериодическое ланка

коливальний ланка
Динаміка процесів в коливальному ланці описується рівнянням:
 ,
,
де k коефіцієнт посилення ланки; Т постійна часу коливального ланки;  коефіцієнт демпфірування ланки (або коефіцієнт загасання).
коефіцієнт демпфірування ланки (або коефіцієнт загасання).
Залежно від величини коефіцієнта демпфірування розрізняють чотири типи ланок:
а) коливальний 0< <1;
<1;
б) апериодическое ланка II порядку  >1;
>1;
в) консервативне ланка  =0;
=0;
г) нестійке коливальний ланка  <0.
<0.
1. Перехідна характеристика коливального ланки:


А

 , Або її можна знайти, визначивши постійну часу експоненти, з якої відбувається загасання
, Або її можна знайти, визначивши постійну часу експоненти, з якої відбувається загасання 
Чим ближче коефіцієнт загасання до одиниці, тим менше амплітуда коливань, чим менше Т, Тим швидше встановлюються перехідні процеси.


при > 1 коливальний ланка називається апериодическим ланкою другого порядку (Послідовне з'єднання двох апериодических ланок з постійними часу Т 1 і Т 2 ).
 , Або можна записати так
, Або можна записати так  .
.
тут
0
- величина, зворотна постійної часу (  );
);
 .
.
Таке ланка в літературі називають консервативним ланкою .


Всі перехідні характеристики будуть коливатися уздовж величини k.
2. Імпульсна перехідна характеристика:






3



Графік АФЧХ буде виглядати наступним чином: 
Це характеристика для коливального ланки і для аперіодичної ланки другого порядку.
Для аперіодичної ланки -  .
.

 -
-
АФЧХ для консервативного ланки.
 .
.
А

 має максимум (резонансний пік), рівний
має максимум (резонансний пік), рівний
Звідси видно, що, чим менше коефіцієнт , Тим більше резонансний пік.

Т



для випадку б)графік буде аналогічним, тільки перегин буде трохи менше (штрихова лінія на графіку).


де 
Асимптотична ЛАЧХ коливального ланки:

Визначаємо нахил на другій ділянці:
Шаблон до графіку а)дається від 0 до 1 кроком в 0,1.
До



Структурна схема коливального ланки буде виглядати наступним чином:


Прикладом коливального ланки є будь-яка RLС- ланцюг.
Загальні властивості статичних ланок
У сталому режимі вихідна змінна y однозначно пов'язана з вхідної змінної x рівнянням статики

Передавальний коефіцієнт ланки пов'язаний з функцією передачі співвідношенням


Ланки є ланками низької частоти (крім безінерційного), тобто добре пропускають низькочастотні сигнали і погано - високочастотні, в режимі гармонічних коливань створюють негативні фазові зрушення.
Ланкою САУ називають математичну модель елемента або сполуки елементів будь-якої частини системи. Ланки, як і системи, можуть описуватися диференціальнимирівняннями високого порядку і в загальному випадку іхпередаточние функції можуть бути представлені як
Але їх можна представити як з'єднання типових або елементарних ланок, порядок диференціальних рівнянь яких не вище другого.
З курсу алгебри на підставі теореми Безу відомо, що поліном довільного порядку можна розкласти на прості множники виду

 ,
, . (4.64)
. (4.64)
Тому передавальну функцію (4.63) можна представити, як твір простих множників виду (4.64) і простих дробів виду
 ,
,
 ,
, .
(4.65)
.
(4.65)
Ланки, передавальні функції яких мають вигляд простих множників (4.63) або простих дробів (4.64), називають типовими або елементарними ланками.
Перш ніж переходити до вивчення елементарних ланок, згадаємо формули для модуля і аргументу комплексного числа. Нехай комплексне число представлено у вигляді відносини двох творів комплексних чисел

Так як  ,
, , То для модуля і аргументу комплексного числа маємо
, То для модуля і аргументу комплексного числа маємо
 ,
,
 .
.
Таким чином, справедливо наступне правило модулів і аргументів комплексних чисел: модуль комплексного числа, представленого у вигляді відносини двох творів комплексних чисел, дорівнює відношенню твори модулів співмножників чисельника до добутку модулів співмножників знаменника, а його аргумент - різниці суми аргументів співмножників чисельника і суми аргументів співмножників знаменника.
пропорційне ланка. Пропорційним називають ланка, яка описується рівнянням  або передавальною функцією
або передавальною функцією  .
.
Частотні і тимчасові функції цього типового Евена мають вигляд:
 ,
,
 ,
, ,
,
 ,
,
 ,
, ,
, .
.
Ha рис. 4.5 представлені деякі з характеристик пропорційного ланки: амплітудно-фазова частотна характеристика (4.5 а) - це точка Дона дійсній осі; фазова частотна
jVа)L(w) Б)h(t) В)
20 lgK K
K U w t
Рис.4.5 Характеристики пропорційного ланки
характеристика (або АФЧХ) збігається з позитивною віссю частот; логарифмічна амплітудна частотна характеристика (рис. 4.56) паралельна осі частот і проходить нарівні .
Перехідна характеристика (ріс.4.5в) паралельна осі часу і проходить на рівні  .
.
Інтегруюча ланка.Інтегруючим називають ланка, яка описується рівнянням  або передавальною функцією
або передавальною функцією  . Частотна передаточна функція
. Частотна передаточна функція  .
.
Решта частотні і тимчасові функції мають вигляд:
 ,
,
 ,
, ,
, ,
,
 ,
,
 ,
, .
.
АФЧХ (рис.4.6) інтегруючого ланки збігається з негативною уявної полуосью. ЛФЧХ (ріс.4.66) паралельна осі частот і проходить на рівні: зсув фази не залежить від частоти і дорівнює  .
.
ЛАЧХ (ріс.4.6б) - похила пряма, що проходить через точку з координатами  і
і  .
Як видно з рівняння при збільшенні частоти наI декаду ордината
.
Як видно з рівняння при збільшенні частоти наI декаду ордината  ,
зменшується на 20 дБ. Тому нахил ЛАЧХ дорівнює -20 дБ / дек (читається: мінус двадцять децибел на декаду).
,
зменшується на 20 дБ. Тому нахил ЛАЧХ дорівнює -20 дБ / дек (читається: мінус двадцять децибел на декаду).
Перехідна характеристика являє собою пряму, що проходить через початок координат з кутовим коефіцієнтом нахилу, рівним k. (Ріс.4.6в).
 а Б В)
а Б В)
jV
U
L(w)
 (W)h(t)
(W)h(t)
0.1 1.0 w arctgK
-
 /2
t
/2
t
Рис 4.6 Характеристики інтегруючого ланки
Дифференцирующее ланка.Диференціюються називають ланка, яка описується рівнянням  або передавальною функцією
або передавальною функцією  .
.
Частотні і тимчасові функції цієї ланки мають вигляд
 ,
,
 ,
, ,
, ,
, ,
,
,
 ,
, .
.
 jVа)L(w)
jVа)L(w)
 (w) Б)
(w) Б)
+
 /2
/2
0,1 1,0 10
Рис.4.7 Характеристики дифференцирующего ланки
АФЧХ (рис 4.7а) збігається з позитивною уявної полуосью. ЛФЧХ (рис 4.7б) паралельна осі частот і проходить на рівні  , Тобто зрушення фази не залежить від частоти і дорівнює
, Тобто зрушення фази не залежить від частоти і дорівнює  /2.
/2.
ЛАЧХ є пряма лінія, що проходить через точку з координатами  =1,
=1, і має нахил 20 дБ / дек (читається: плюс двадцять децибел на декаду):
і має нахил 20 дБ / дек (читається: плюс двадцять децибел на декаду):  збільшується на 20 дБ при збільшенні частоти на одну декаду.
збільшується на 20 дБ при збільшенні частоти на одну декаду.
апериодическое ланка. Апериодическим евеном першого порядку називають ланка, яка описується рівнянням
 (4.66)
(4.66)
або передавальною функцією
 .
(4.67)
.
(4.67)
Ця ланка також називають інерційним ланкою першого порядку. Апериодическое ланка на відміну від вище розглянутих ланок характеризується двома параметрами: постійної часу T і передавальним коефіцієнтом k.
 .
(4.68)
.
(4.68)
Помноживши чисельник і знаменник на комплексно-поєднане знаменника вираз, отримаємо
 ,
,
 .
(4.69)
.
(4.69)
Амплітудну і фазову частотні функції можна визначити, використовуючи правило модулів і аргументів.
Так як модуль чисельника частотної передавальної функції (4.68) дорівнює k, А модуль знаменника  , то
, то
 (4.70)
(4.70)
аргумент чисельника  дорівнює нулю, а аргумент знаменника
дорівнює нулю, а аргумент знаменника  . Тому
. Тому
Вирішивши диференціальне рівняння (4.66) при  і нульовому початковому умови
і нульовому початковому умови  , Отримаємо перехідну характеристику
, Отримаємо перехідну характеристику  . Вагова функція або імпульсна перехідна характеристика
. Вагова функція або імпульсна перехідна характеристика
 .
.
АФЧХ апериодического Евена (рис. 4.8а) є півколо, в чому не важко переконатися, виключивши з параметричних рівнянь (4.69) АФЧХ частоту  .
.
ЛАЧХ представлена на рис 4.8б. На практиці зазвичай обмежуються побудовою так званої асимптотической ЛАЧХ (ламана лінія на тому ж рис 4.86). У критичних випадках, коли невелика похибка може вплинути на висновки про стан досліджуваної системи, розглядають точну ЛАЧХ. Втім, точну ЛАЧХ можна легко побудувати по асимптотической ЛАЧХ, якщо скористатися наступною залежністю ( L
- різниця між асимптотической і точної ЛАЧХ):
L
- різниця між асимптотической і точної ЛАЧХ):
T  =
0,10
0,25 0,40 0,50 1,0 2,0 2,5 4,0 10,0
=
0,10
0,25 0,40 0,50 1,0 2,0 2,5 4,0 10,0
 L=
0,04
0,25 0,62 0,96 3,0 0,96 0,62 0,25 0,04
L=
0,04
0,25 0,62 0,96 3,0 0,96 0,62 0,25 0,04
частоту  , При якій перетинаються асимптоти, називають сопрягающей частотою. Точна і асимптотична ЛАЧХ
, При якій перетинаються асимптоти, називають сопрягающей частотою. Точна і асимптотична ЛАЧХ

Ріо.4.8 Характеристики аперіодичної ланки
найбільш сильно відрізняються при сопрягающей частоті; відхилення при цій частоті приблизно 3 дБ.
Рівняння асимптотической ЛАЧХ має вигляд:



Воно виходить з рівняння (4.71), якщо в ньому під коренем при  знехтувати перших складових, а при
знехтувати перших складових, а при  -
другим доданком.
-
другим доданком.
Відповідно до отриманої рівняння, асимптотическую ЛАЧХ можна будувати таким чином: на рівні  частоти
частоти  провести пряму, паралельно осі частот, а далі через точку з координатами
провести пряму, паралельно осі частот, а далі через точку з координатами  і
і  - пряму під нахилом - -20 дБ / дек.
- пряму під нахилом - -20 дБ / дек.
За АФЧХ або ЛАЧХ легко визначити параметри Ті k аперіодичної ланки (ріс.4.86).
ЛФЧХ зображена на рис. 4.86. Ця характеристика асимптотично прагне до нуля при  і до
і до  при
при  . при
. при  фазо- частотна функція приймає значення -
фазо- частотна функція приймає значення -  , тобто
, тобто  . ЛФЧХ
всіх апериодических ланок мають однакову форму і можуть бути отримані на основі однієї характеристики паралельним зрушенням уздовж осі частот вліво або вправо в залежності від значення постійної часу T. Тому для побудови ЛФЧХ аперіодичної ланки можна скористатися шаблоном, представленому на ріс.4.8г.
. ЛФЧХ
всіх апериодических ланок мають однакову форму і можуть бути отримані на основі однієї характеристики паралельним зрушенням уздовж осі частот вліво або вправо в залежності від значення постійної часу T. Тому для побудови ЛФЧХ аперіодичної ланки можна скористатися шаблоном, представленому на ріс.4.8г.
Перехідна характеристика аперіодичного ланки (ріс.4.8в) являє собою експонентну криву, по якій можна визначити параметри цієї ланки: передавальний коефіцієнт k
визначається по сталому значенню  ; постійна часу Tдорівнює значенню t, відповідному точці перетину дотичній, побудованої на перехідній характеристиці на початку координат, з її асимптотой (рис 4.8В).
; постійна часу Tдорівнює значенню t, відповідному точці перетину дотичній, побудованої на перехідній характеристиці на початку координат, з її асимптотой (рис 4.8В).
форсує ланка. Форсують ланкою або форсують ланкою першого порядку називають ланка, яка описується рівнянням
 ,
,
або передавальною функцією

 .
.
Це ланка, як і апериодическое, характеризується двома параметрами: постійної часу T і передавальним коефіцієнтом k.
Частотна передаточна функція
 .
.
Решта частотні і тимчасові функції мають вигляд:
 ,
,
 ,
, ,
, ,
,
,
 ,
, .
.
АФЧХ є пряма, паралельна уявної осі і перетинає дійсну вісь в точці U=
k. (Рис. 4.9а). Як і в випадку аперіодичної ланки, на практиці обмежуються побудовою асимптотической ЛАЧХ. частоту  , Що відповідає крапці зламу цієї характеристики, називають сопрягающей частотою. Асимптотична ЛАЧХ при
, Що відповідає крапці зламу цієї характеристики, називають сопрягающей частотою. Асимптотична ЛАЧХ при  паралельна осі частот і перетинає вісь ординат при
паралельна осі частот і перетинає вісь ординат при  , А при
, А при  має нахил + 20дБ / дек.
має нахил + 20дБ / дек.
ЛФЧХ форсує ланки можна отримати дзеркальним відображенням відносно осі частот ЛФЧХ аперіодичної ланки і для її побудови можна скористатися тим же шаблоном і номограми, які використовуються для побудови останньої.
Коливальний, консервативне і апериодическое другого порядку ланки. Ланка, яке можна описати рівнянням

 (4.72)
(4.72)
або в іншій формі
де,  ,
, .
.
Передавальна функція цієї ланки

 (4.74)
(4.74)
Ця ланка є коливальним, якщо  ; -Консерватівним, якщо
; -Консерватівним, якщо 
 ; - апериодическим ланкою другого порядку, якщо
; - апериодическим ланкою другого порядку, якщо  .
коефіцієнт
.
коефіцієнт  називають коефіцієнтом демпфірування.
називають коефіцієнтом демпфірування.
коливальний ланка
 . Частотна передаточна функція цієї ланки
. Частотна передаточна функція цієї ланки
 .
.
Помноживши чисельник і знаменник на комплексно-поєднане вираз, отримаємо речову і уявну частотні функції коливального ланки:
 ,
,

Фазова частотна функція, як це видно з АФЧХ (рис 4.10б), змінюється монотонно від 0 до -  і виражається формулою
і виражається формулою

 (4.75)
(4.75)
ЛФЧХ (ріс.410б) при  асимптотично прагне до осі частот, а при
асимптотично прагне до осі частот, а при  до прямої
до прямої  . Її можна побудувати за допомогою шаблону. Але для цього необхідно мати набір шаблонів, відповідних різним значенням коефіцієнта демпфірування.
. Її можна побудувати за допомогою шаблону. Але для цього необхідно мати набір шаблонів, відповідних різним значенням коефіцієнта демпфірування.
Амплітудна частотна функція

і логарифмічна амплітудно-частотна функція
Рівняння асимптотической ЛФЧX має вигляд


 (4.75)
(4.75)
де  - сполучаються частота. Асимптотична ЛАЧХ (ріс.4.106) при
- сполучаються частота. Асимптотична ЛАЧХ (ріс.4.106) при  паралельна осі
частот, а при
паралельна осі
частот, а при  має наклон- -40 дБ / дек.
має наклон- -40 дБ / дек.

Мал. 4.10 .Характерістікі коливального ланки
Слід мати на
увазі, що асимптотична ЛАЧХ (рис 4.10б) при малих значеннях коефіцієнта демпфірування досить сильно відрізняється від точної ЛАЧХ. Точну ЛАЧХ можна побудувати по асимптотической ЛАЧХ, скориставшись кривими відхилень точних ЛАЧХ від асимптотических (ріс.4.10г). Вирішивши диференціальне рівняння (4.72) коливального ланки при  і нульових початкових умовах
і нульових початкових умовах  знайдемо перехідну функцію.
знайдемо перехідну функцію.
 ,
,
 ,
,
 ,
,
 .
.
вагова функція
 .
.
По перехідній характеристиці (ріс.4.10в) можна визначити параметри коливального ланки наступним чином.
Вступ
Теорія автоматичного управління є технічною наукою загального застосування. Вона дає теоретичну базу для дослідження, розробки і проектування автоматичних і автоматизованих систем.
1. Основні поняття і визначення
Існує надзвичайно велика різноманітність систем, автоматично виконують ті чи інші функції з управління різними фізичними процесами в усіх сферах технології.
Автоматична система здатна протягом тривалого часу за потрібне чином змінювати будь-які фізичні величини в тому чи іншому керованому процесі.
Автоматизована система - система, в якості одного з вузлів якої використовується людина-оператор.
Операція управління - дії, спрямовані на правильне і якісне функціонування об'єкта управління. Вони забезпечують в потрібний момент часу початок, порядок проходження і припинення окремих дій; передбачають виділення необхідних ресурсів і задають потрібні параметри самого процесу.
Об'єкт управління - це сукупність технічних засобів, що виконують певний процес і підлягають управлінню.
Всі системи автоматичного управління (САУ) можна класифікувати в такий спосіб.
1. По виду структурної схеми:
- розімкнуті (автомати, що працюють за деякими програмами);
- замкнуті (зі зворотним зв'язком).
2. По виду рівнянь динаміки процесів управління:
- лінійні;
- нелінійні.
Найбільш повно вивчені лінійні системи.
3. За характером передачі сигналу:
- безперервні;
- дискретні:
- імпульсні (дискретні за часом);
- цифрові (дискретні за часом і за рівнем);
- релейні (сигнал змінюється стрибком).
4. За характером функціонування:
- звичайні;
- адаптивні (які самостійно).
5. В залежності від характеру зміни керуючого впливу:
- системи автоматичної стабілізації;
- системи програмного управління;
- системи стеження.
Типова схема САУ виглядає наступним чином (рис. 1).
Мал. 1. Типова схема САУ
g(t) - задає вплив;
f(t) - рівноваги вплив (може діяти на будь-який блок системи);
у(t) - вихідний сигнал;
1 - пристрій, що задає. Пристрій перетворює вхідний вплив g(t) В сигнал, пропорційний заданому значенню вихідної величини у(t);
2, 5 - пристрої порівняння. Виробляють сигнал неузгодженості (помилки) е(t) Між вхідним сигналом і сигналом головним зворотним
зв'язку;
3 - перетворює пристрій;
4, 8 - коригувальні пристрої. Підвищують якість управління;
6 - підсилювальний пристрій;
7 - виконавчий пристрій;
9 - вимірювальний пристрій;
10 - пристрій, що погодить. Виробляє сигнал, що знаходиться в певній функціональній залежності від регульованої змінної;
11 - об'єкт управління.
Таким чином, спрощено будь-яку САУ можна представити таким чином (рис. 2).
 |
Мал. 2. Спрощена схема САУ
Завдання теорії САУ
Теорія автоматичного управління вивчає загальні принципи побудови САУ і методи їх дослідження незалежно від фізичної природи процесів.
Можна виділити два завдання.
1. Завдання аналізу: дослідження статичних та динамічних властивостей системи.
2. Завдання синтезу: розробка нових систем, які відповідають заданим технічним вимогам.
При вирішенні цих завдань досліджуються такі питання.
1. Формування функціональної та структурної схем САУ.
2. Побудова статичних і динамічних характеристик окремих ланок і системи в цілому.
3. Визначення помилок управління і показників точності замкнутої системи.
4. Дослідження стійкості системи.
5. Оцінка якісних показників процесу управління.
6. Синтез коригувальних пристроїв і оптимізація параметрів системи.
3. Диференціальні рівняння і
передавальні функції
Для аналізу систем необхідно мати їх математичний опис. Зазвичай це диференціальні рівняння (ДУ). Якщо в цьому рівнянні використовуються похідні вхідних і вихідних величин, то це рівняння динаміки. Якщо покласти нулю похідні вхідних сигналів, - це рівняння статики (опис системи в сталому режимі). Ці рівняння складаються на основі фізичних законів.
У загальному випадку отримані рівняння є нелінійними. Для спрощення аналізу застосовують ті чи інші методи лінеаризації, наприклад, розкладання в ряд Тейлора.
У загальному вигляді лінійне диференціальне рівняння має наступний вигляд:
У теорії автоматичного управління прийнята стандартна форма запису диференціальних рівнянь: - похідна замінюється на оператор p,коефіцієнт при вихідній величині має бути рівний 1.
Наприклад, для рівняння другого порядку:
параметр Kназивається коефіцієнтом передачі (коефіцієнт посилення). Це відношення вихідної величини до вхідної в усталеному режимі.
параметр Т- постійна часу.
Такий вид представляє першу форму опису САУ.
Крім опису в тимчасовій області, системи описуються передавальними функціями. Щоб отримати передавальну функцію потрібно використовувати розкладання Лапласа
 ,
,
де р = з + jd- комплексне число;
f(t) - оригінал;
F(p) - зображення по Лапласа.
Відповідно і диференціальне рівняння можна перетворити і записати щодо зображень (див. Приклад вище):
Це друга форма опису САУ.
передавальна функція- це відношення зображень вихідний і вхідний величини, знайдене з вищерозглянутого рівняння:
 .
.
Для дослідження частотних властивостей САУ використовується частотна передаточна функція. Для її отримання використовується перетворення Фур'є. При цьому оператор p = j w, а частотна передаточна функція записується у вигляді W(j w). Таке уявлення є третьою формою опису систем.
характеристики САУ
Існують різні методи дослідження САУ або окремих її ланок. Один з них полягає в аналізі реакції системи або ланки на зовнішній вплив.
В якості зовнішніх впливів використовують стандартні сигнали. В теорії САУ використовують три види сигналу.
1. Одиничне вхідний вплив 1 ( t) (Рис. 3).
 |
Мал. 3. Одиничне вхідний вплив
2. d-імпульс - сигнал нульовий ширини і нескінченної амплітуди - d ( t), Причому його площа дорівнює 1 (рис. 4)

 .
.
Мал. 4. Дельта-імпульс
Така функція є математичною абстракцією. Практично таким сигналом вважається короткий імпульс великої потужності.
d-імпульс математично пов'язаний з сигналом 1 ( t):
![]() .
.
3. А sinw t, Причому для простоти А = 1.
Відповідно, на кожен з цих стандартних сигналів існує певна реакція САУ.
1. Реакцією САУ або ланки на одиничний вхідний вплив називається перехідна характеристикаабо перехідна функція h(t) (Рис. 5).
Мал. 6. Приклад ваговій функції САУ
При використанні перетворення Лапласа отримаємо наступні співвідношення:
![]() .
.
Перетворенням Лапласа від вагової функції є передавальна функція.
Вагова функція і перехідна характеристика пов'язані простим співвідношенням
![]() .
.
Опис САУ в тимчасовій області через вагову функцію еквівалентно опису передавальної функцією в області зображень.
Можна знайти реакцію системи на довільний вхідний сигнал. Для цього можна скористатися інтегралом Дюамеля або інтегралом згортки
 .
.
3. Якщо використовується вхідний сигнал виду А sinw t, То говорять про частотні характеристики системи.
частотні характеристики- це вираження і графічні залежності, що виражають реакцію досліджуваної САУ на сигнал виду А sinw tпри різних значеннях частоти w.
На виході САУ сигнал буде мати вигляд
де A(t) - амплітуда сигналу, j ( t) - зсув фази.
Частотну передавальну функцію для отримання частотних характеристик можна представити в наступному вигляді:
![]() ;
;
 , (1)
, (1)
де u(W) і v(W) - дійсна і уявна частини комплексного вираження.
Матеріальна частина складається з парних ступенів частоти w, а уявна - з непарних.
Цю функцію можна представити графічно на комплексній площині. Таке зображення називається годографом(Рис. 7) або амплітудно-фазової характеристикою. Крива будується шляхом отримання точок на площині при завданні певних значень частоти w і розрахунку u(W) і n (w).
Для отримання графіка в разі негативних частот необхідно зробити дзеркальне відображення наявної характеристики щодо дійсної осі.
 |
Мал. 7. Годограф або амплітудно-фазова характеристика системи
Аналогічним чином можна побудувати окремо графіки довжини вектора А(W) і кута повороту j (w). Тоді отримаємо амплітудно-частотну і фазо-частотну характеристики.
На практиці часто використовують логарифмічні характеристики. Логічно використовувати натуральний логарифм
Однак на практиці використовують десяткові логарифми і отримують логарифмічну амплітудно-частотну(ЛАЧХ) (Рис. 8) і логарифмічну фазо-частотну(ЛФЧХ) Характеристики(Рис. 9).
Мал. 9. Приклад ЛФЧХ системи
При обчисленні логарифмічною фазочастотной характеристики використовується (1).
При побудові графіків по осі абсцис відкладають частоту в логарифмічному масштабі. Так як при обчисленні значень ЛАЧХ в виразах використовуються залежно від ступеня w, то графік має стандартний нахил, кратний 20 дБ / дек. Дек - декада, т. Е. Зміна частоти на порядок.
Теоретично точка w = 0 на осі частот повинна бути зліва в нескінченності, але для практичних розрахунків вісь ординат зрушують вправо.
Логарифмічні характеристики мають такі переваги:
- простота побудови;
- легкість отримання ЛАЧХ системи з ЛАЧХ ланок шляхом геометричного складання;
- простота аналізу САУ.
закони управління
Це алгоритми або функціональні залежності, відповідно до яких формується керуючий (регулюючий) вплив.
u(t) = F(x(t), g(t), f(t)),
де x(t) - помилка;
g(t) - задає вплив;
f(t) - рівноваги вплив.
u(t) = F 1 (x) + F 2 (g) + F 3 (f),
де F 1 (x) - управління по відхиленню або помилку;
F 2 (g) і F 3 (f) - управління по відповідному впливу.
Зазвичай розглядаються лінійні закони щодо в ДУ.
Розрізняють декілька типових законів управління.
1. Пропорційне управління.
У ланцюзі управління знаходиться пропорційне (статичну)
ланка.
У сталому режимі:
 ,
,
де K- загальний коефіцієнт посилення системи;
yУСТ - стале значення вихідної величини;
x 0 - постійне значення помилки.
Для замкнутої САУ знайдемо стале значення помилки за формулою (3):
де g 0 - постійний вхідний вплив;
x fУСТ - що встановилася помилка від впливу, що обурює.
Аналіз виразу показує, що встановилася помилка зменшилася в (1 + K) Раз, але в принципі не дорівнює 0.
2. Інтегральне управління.
У цьому випадку має місце залежність між помилкою і швидкістю зміни регулюючого (керуючого) впливу
![]() ;
;
У складі САУ обов'язково є інтегрують ланки.
Стале значення помилки знаходимо за формулою (3).
Перший доданок дорівнює 0, друге залежить від значення чисельника, тому для нього застосуємо вираз
 .
.
При відсутності обурює впливу загальне значення сталої помилки дорівнює нулю.
Система є астатической по задає впливу або володіє астатизмом першого порядку. Однак, якщо задає вплив змінно (швидкість його зміни не дорівнює 0), то що встановилася помилка буде мати нульове значення.
Для усунення помилки по швидкості в САУ необхідно додати ще один інтегратор.
Такий підхід має недолік: при наявності великої кількості інтеграторів процес управління сповільнюється і змінюється стійкість системи.
3. Управління по похідною (диференціальне).
Процес управління описується співвідношеннями:
![]() ;
;
![]() .
.
Процес управління починає діяти, коли помилка ще дорівнює 0, а її похідна відмінна від 0. В усталеному режимі і ланцюг управління розривається, отже, цей закон не має самостійного значення. Використовується як доповнення до інших. Він забезпечує швидку реакцію САУ в перехідному режимі.
4. ізодромного управління.
Можливе використання всіх перерахованих вище законів одночасно. Закон управління в цьому випадку має вигляд:
 .
.
Таке управління поєднує гідності всіх розглянутих законів. Наприклад, при лінійно змінюваному вхідній дії (рис. 28) в початковий момент (ділянка I) діє управління по похідній, потім більший внесок вносить пропорційне керування, після моменту часу t 0 (ділянка II) істотно інтегральне управління.
 |
Мал. 28. Закони управління в САУ
9. Процес управління та вимоги до нього
Процес управління в часі визначається рішенням диференціального рівняння динаміки замкнутої системи. При цьому можна визначити вимоги до системи за трьома основними напрямками.
1. Принципова оцінка можливості переходу системи в деякий сталий стан при будь-якому зовнішньому впливі. Це оцінка стійкості системи.
2. Оцінка якості перехідного процесу.
3. Оцінка точності системи в сталому стані.
Розглянемо кожен з цих пунктів.
критерії стійкості
Критерії стійкості можна розбити на дві великі групи.
1. Алгебраїчні.
2. Частотні.
Розглянемо їх докладніше.
Показники якості
Вимоги до якості процесу управління в кожному конкретному випадку можуть бути різними, але як правило, оцінюється характер перехідного процесу при одиничному східчастому вплив (рис. 40).
 |
Мал. 40. Показники якості перехідного процесу
Використовуються такі показники якості перехідного
процесу.
1. tРЕГ - час регулювання (тривалість перехідного процесу), час, протягом якого, починаючи з моменту прикладення вхідного впливу, відхилення вихідної величини від її сталого значення, стає менше наперед заданого значення Δ. Зазвичай вибирається Δ = 5% від хУСТ.
2. Перерегулювання:
 .
.
3. Коливання - число повних коливань вихідної величини за час регулювання.
4. Встановлена помилка - це різниця між заданою дією і сталим значенням вихідної величини.
метод Солодовникова
Тут вводиться поняття типовий одиничної трапецеидальной речової характеристики. Її висота дорівнює 1, частота зрізу (частота позитивності) w п = 1 (рис. 41).

Мал. 41. Типова одинична трапецеїдальних речова характеристика
Для даної трапеції існують таблиці зв'язку вихідної величини х(t) Від коефіцієнта нахилу c = w а / w п.
Метод полягає у виконанні наступної послідовності дій.
1. Будується графік дійсної частини частотної передавальної функції замкнутої системи.
2. Графік розбивається на трапеції. Ця процедура представлена на рис. 42. У даному прикладі вийшло три типові трапеції.
 |
Мал. 42. Розбиття графіка речової характеристики на трапеції
3. Для кожної трапеції за таблицями знаходяться значення вихідного процесу x 1 (t), x 2 (t), x 3 (t).
4. Знаходиться результуючий графік вихідного сигналу шляхом складання графіків x 1 (t), x 2 (t), x 3 (t).
Так як таблиці розроблені для одиничної трапеції, то при побудові перехідного процесу для кожної трапеції, необхідно використовувати правила (формули) переходу до реального значення відліків вихідного сигналу.
1. Отримання сталого значення P(0) = x(∞) = xУСТ.
2. Отримання дійсної амплітуди сигналу
3. Зміна масштабу часу  .
.
Показники якості перехідного процесу можна приблизно оцінити по речовій частотної характеристики замкнутої системи, не виконуючи вишерассмотренних обчислень. Всі різновиди графіка цієї характеристики представлені на рис. 43.
 |
Мал. 43. Типовий вид графіків речової характеристики
1 - графік характеристики має «горб»;
2 - «горба» немає, похідна і приймає різні значення;
3 - «горба» немає, і монотонно убуває.
У разі 1 перехідний процес х(t) Має перерегулювання, причому його величина більше 18%.
У разі 2 перехідний процес х(t) Має перерегулювання, причому його величина менше 18%.
У разі 3 процес управління монотонний.
За графіком можна наближено визначити і час перехідного процесу
 ,
,
де w СЧ - діапазон істотних частот. характеристика Р(W) в цьому діапазоні перевищує деякий рівень e. Зазвичай e = 5%.
показник колебательности
Цей параметр використовується для визначення запасу стійкості. Його можна обчислити за значенням модуля частотної передавальної функції замкнутої системи
![]() .
.
Показник колебательности дорівнює відношенню  і представлений на рис. 44.
і представлений на рис. 44.
 |
Мал. 44. Модуль частотної передавальної функції замкнутої системи
Це відносна висота резонансного піку. Для спрощення розрахунків вважається, що М(0) = 1. При цьому МК = М MAX.
Фізично показник колебательности - це відношення максимальних значень вихідного і вхідного сигналів САУ.
Чим менше запас стійкості САУ, тим більше схильність системи до коливань, тим вище резонансний пік. Зазвичай показник колебательности лежить в діапазоні 1,1 ... 1,5.
M kможна визначити по виду частотної характеристики розімкнутої системи, користуючись функцією передачі розімкнутої системи
 .
.
представивши W(j w) через дійсну Uі уявну Vчастини, отримаємо:
![]() ;
;
Дані співвідношення описують окружність, причому З- речова координата її центру; R- радіус.
На комплексній площині можна побудувати сімейство кіл з цими параметрами, залежними від М. На цей графік наноситься годограф розімкнутої системи (рис. 45).
Мал. 46 Побудова графіка модуля частотної передавальної функції
замкнутої системи
Іноді досить визначити максимальне значення М MAX (по торкання АФХ відповідної окружності).
Можливо рішення оберненої задачі: задається допустиме значення показника МДОП. Необхідно відповідним чином спроектувати систему.
Для виконання цієї умови потрібно забезпечити, щоб годограф САУ не заходив в область, обмежену колом із заданим значенням М(Рис. 47).
 |
Мал. 47. Допустима зона параметрів САУ за показником колебательности
Синтез лінійних САУ
Способи синтезу САУ
Головні цілі проектування САУ - забезпечення стійкості системи та забезпечення необхідної якості перехідного процесу.
Досягти цих цілей можна двома способами.
1. Зміна параметрів системи, т. Е. Зміна параметрів ланок (коефіцієнт посилення, постійна часу). У ряді випадків такий підхід не призводить до бажаного результату.
2. Зміна структури системи. Зазвичай це введення додаткових пристроїв або блоків (корегувальних пристроїв).
Розглянемо докладніше другий підхід.
В теорії САУ розрізняють 4 види коригувальних пристроїв.
1. Послідовні коригувальні пристрої (коригувальні фільтри).
2. Паралельні коригувальні пристрої, зазвичай у вигляді місцевої зворотного зв'язку.
3. Коригувальні пристрої по зовнішньому впливу.
4. непоодинокі головна зворотній зв'язок.
завдання
Необхідно виконати наступні дії.
1. Описати роботу системи.
2. Визначити передавальні функції елементів системи.
3. Скласти структурну схему системи.
4. Побудувати логарифмічні характеристики розімкнутої
системи.
5. Визначити стійкість і запас стійкості по амплітуді і фазі.
6. За допомогою критерію Гурвіца визначити критичне значення добротності системи без зворотного зв'язку.
7. Ввести швидкісну зворотний зв'язок.
8. Знайти мінімальне значення коефіцієнта швидкісний зворотного зв'язку, необхідного для стійкості системи.
9. Знайти оптимальне значення коефіцієнта швидкісний зворотного зв'язку, необхідного для забезпечення показників якості перехідного процесу системи.
Початкова схема САУ (рис. 59):
 |
Мал. 59. Початкова схема системи
де СП - сельсину пара;
Р - редуктор;
Д - двигун;
ОУ - об'єкт управління;
У - підсилювач;
КО - командна вісь;
ІВ - виконавча вісь;
α - кут повороту сельсин-датчика - це командне вплив;
β - кут повороту двигуна;
γ - кут повороту редуктора - це виконавче вплив;
U 1 - вихідний сигнал СП;
U 2 - вихідний сигнал У;
Параметри САУ:
U MAX - максимальна напруга на виході сельсин-трансформатора;
kУ - коефіцієнт посилення У;
TУ - постійна часу У;
UУ - номінальна напруга на обмотці управління двигуна;
N XX - число оборотів в хвилину при холостому ході двигуна і при номінальній напрузі двигуна;
TД - постійна часу Д;
i- передавальне число редуктора;
SТГ - крутизна вихідний характеристики тахогенератора;
tРЕГ - час регулювання;
s - величина перерегулювання;
n- число повних коливань вихідного сигналу.
Вихідні дані:
kУ = 900;
TУ = 0.01 с;
TД = 0.052 с;
i= 1.2 × 10 3,
U MAX = 5 В;
UУ = 30 В;
N XX = 10000 об / хв;
SТГ = 0.001 В × с / рад;
tРЕГ £ 1 с;
n = 1,5.
Опис роботи системи
Зі схеми системи, наведеної в завданні видно (див. Рис. 59), що задає пристроєм є командна вісь, що обертається сельсин-датчиком за довільним законом α = α ( t). Той же самий закон кута повороту в часі α ( t) = γ( t) Повинен бути автоматично відтворений на виході системи, т. Е. На об'єкт управління і на виконавчу вісь. Якщо кути повороту командної і виконавчої осі не рівні, (α ( t) ¹ γ( t)), То на виході сельсина пари виникає напруга неузгодженості U 1. величина U 1 залежить від величини кутів повороту командної і виконавчої осей. напруга U 1 надходить на вхід підсилювача, на виході якого виникає напруга U 2, що надходить на обмотку управління двигуна. В результаті цього починає обертатися ротор двигуна в сторону зменшення помилки неузгодженості (θ = α - γ) до узгодження двох осей. Тобто поворот ротора двигуна через редуктор задає новий закон кута повороту виконавчої осі. Ротор двигуна буде обертатися до тих пір, поки помилка неузгодженості не буде зведено до нуля, після чого він зупиниться. Таким чином, система охоплена негативним зворотним зв'язком.
Випадкові процеси в САУ
Основні поняття
Вище були вивчені процеси роботи САУ під час вступу на її вхід детермінованих сигналів.
У багатьох випадках вхідний сигнал може приймати випадкові значення. При цьому можна оцінювати тільки імовірнісні характеристики.
Приклад випадкового впливу: стежить система доплерівського вимірювача швидкості. Спектральні характеристики процесів САУ в цьому випадку представлені на рис. 66.
Доплеровская частота W залежить не тільки від швидкості руху об'єкта, але і від кута падіння променя і виду підстильної поверхні, тому носить випадковий характер. При цьому спектральна характеристика сигналу має амплітуду S W і ширину Dw, що змінюється випадковим чином.
 |
Мал. 66. Спектральні характеристики випадкових процесів САУ
w 0 - яку випромінює частота;
w П - приймається частота;
Dw - ширина спектра.
Розрахунки по мінімуму помилки
Якщо на систему одночасно діє корисний сигнал і перешкода, то може бути вирішена задача оптимального розрахунку системи з тим, щоб забезпечити найменшу результуючу помилку системи.
Критерієм є мінімальне значення результуючої помилки системи, яка визначається сигналом і перешкодою. Для випадкових процесів зазвичай обмежуються оцінкою середньоквадратичної помилки. Необхідно забезпечити мінімум середньоквадратичної помилки при одночасній дії сигналу і перешкоди.
Критерій виглядає наступним чином:
 .
.
Небажаність помилки пропорційна квадрату її величини.
Можливі два формулювання даного завдання.
1. Є САУ заданої структури. Необхідно так вибрати її параметри, щоб забезпечити мінімум СКО при заданих статистичних параметрах сигналу і помилки.
Рішення шукається наступним чином: знаючи спектральну щільність помилки, теоретично знаходиться вираз для розрахунку дисперсії і СКО. Цей вислів залежить від параметрів системи, корисного сигналу і перешкоди. Шукаються умови на параметри системи для забезпечення мінімуму дисперсії. У простих випадках можна застосувати відомі методи знаходження екстремуму функції шляхом диференціювання і прирівнювання до нуля приватних похідних.
2. Ставиться питання про знаходження оптимальної структури системи і параметрів ланок для отримання теоретично мінімальної середньоквадратичної помилки при заданих імовірнісних характеристиках корисного сигналу і перешкоди.
Рішення наступне: знаходиться теоретична передавальна функція замкнутої системи, і до неї прагнуть при проектуванні. Можлива ситуація, що реалізація САУ з такою оптимальною функцією передачі буде пов'язана зі значними труднощами.
нелінійні САУ
Аналіз нелінійних САУ (НСАУ) являє собою досить важке завдання. При її вирішенні прагнуть звести таку САУ до лінійної з певними допущення і обмеженнями.
До таких систем відносяться ті, в яких є хоча б одна ланка, що описується нелінійними диференціальними рівняннями.
Нелінійні ланки можуть бути наступних видів:
Релейного типу;
З кусочно-лінійною характеристикою;
З криволінійної характеристикою будь-якого обриси;
Є твір і інші комбінації змінних;
Нелінійне ланка з запізненням;
Імпульсне ланка;
логічне;
Описується кусочно-лінійним диференціальним рівнянням.
Нелінійності можуть бути статичні і динамічні. Статичні описуються нелінійними статичними характеристиками, а динамічні - нелінійними диференціальними рівняннями.
фазовий простір
Для наочного уявлення процесів нелінійних САУ вводиться поняття «фазовий простір», яке полягає в наступному.
Диференціальне рівняння замкнутої системи n-го порядку замінюється системою диференціальних рівнянь першого порядку.
 ,
,
де x 1 - вихідна величина;
x 2 – x n- допоміжні змінні;
f, g- вхідні впливу (із рівноваги і задаючи);
x 10 = x 1 (t = 0), x 20 = x 2 (t= 0) ... - початкові умови.
Ці диференціальні рівняння можна представити геометрично в nвимірному просторі. Наприклад, при n= 3 (рис. 75).
 |
Мал. 75. Тривимірне фазовий простір
У реальному процесі управління в кожен момент часу величини x 1 , x 2 , x 3 мають цілком певні значення. Це відповідає цілком певному положенню точки Мв просторі. Крапка Мназивається зображує. З плином часу величини x 1 , x 2 , x 3 змінюються, точка Мпереміщається по певній траєкторії, показуючи так звану фазову траєкторію. Отже, траєкторія руху точки Мможе слугувати наочною геометричною ілюстрацією динамічної поведінки САУ в процесі управління.
Розглянемо приклад фазових траєкторій деяких лінійних САУ. Нехай вони описуються рівнянням  . Залежно від параметрів ДУ можливо кілька випадків. Деякі з них представлені на рис. 76.
. Залежно від параметрів ДУ можливо кілька випадків. Деякі з них представлені на рис. 76.
Мал. 76, а відповідає комплексним коріння з негативною дійсною частиною (наявність затухаючого перехідного процесу), випадок рис. 76, б показує фазову траєкторію апериодического затухаючого процесу при негативних речових коренях характеристичного рівняння.
ДУ є вираження для проекцій швидкості зображує точки Мна óсі координат. Тому за значеннями правих частин рівнянь в кожен момент часу можна судити про рух точки М, І, отже, про поведінку реальної НСАУ в процесі управління.
Фазова траєкторія - це якісна характеристика НСАУ. Для визначення кількісних значень вихідних сигналів необхідно вирішувати диференціальні рівняння в кожній точці.
Якщо диференціальні рівняння складені для відхилень вихідного сигналу від сталих значень, то для стійкої системи фазова крива буде прагнути в початок координат.
 |
 а)
а)
Мал. 76. Приклади фазових траєкторій
Стійкість за Ляпуновим